Development of Vector Systems Applied Theory for Robotic Technology as an Alternative for Quantum One
The technology is based on the idea of simultaneously processing information on many categories of attributes in the minimized basis of a t-dimensional coordinate system, namely the concept of vector systems theory. The underlying mathematical principle is related to the optimal placement of structural elements in spatially or temporally distributed systems, where the basis is a subset of the set of the total number of coordinate sets of this system, which generates it by the combinational addition of the latter, and the set of the processed vector sets mutually uniquely corresponds to the set of their combinational sums, as well as to the set of binary code combinations. In other words, the mathematical models of the systems with elements distributed in space are studied in such a way that the set of all spatial distances, as well as all their possible combinational sums, mutually uniquely correspond to a set of binary code in the minimized basis of the coordinate system that wraps the surface of a manifold of corresponding dimensions and dimensionality with a common reference point in this system. All algebraic operations are performed by taking into account the numerical values of the modules that correspond to the dimensions, and their quantity, which is determined by the number of dimensions of the coordinate system. The theory includes the development of methods for improving the quality indicators of robotic engineering devices and systems in terms of such indexes as reliability, accuracy, resolution, and other significant characteristics of systems (for example, for constructing specified phase trajectories when controlling dynamic objects in spatial coordinates according to several variable parameters at the same time). The processing of multidimensional data sets on the minimized basis of the t-dimensional coordinate system opens up prospects for development of the vector systems applied theory for robotic technology as an alternative to quantum ones.
Introduction
Vector systems theory is a new subfield of combinatorial theory [1] that relates finding optimal solutions to problems connected from sets that have finite number of elements, where the sets of feasible solutions are discrete. Classic combinatorial optimization problems are, for example, the traveling, and the knapsack problem. In such problems, exhaustive search is not high-quality, and so directed on algorithms that quickly rule out large parts of the search space or estimate algorithms must be resorted to instead. Combinatorial optimization is related to algorithm theory, operations research, and computational complexity theory. It has significant applications in several fields, including robotics, artificial intelligence, theoretical computer science, and data mining technologies, intelligent systems, computational linguistics, and big data [2, 3, 4, 5]. A number of research works consider combinatorial configurations using optimization of integer programming together with discrete optimization of big vector data coding and data mining technologies, which are composed with multi- dimensional systems theory [6]. Applications profiting from optimum vector information technologies based on the multi-dimensional combinatorial systems theory provide for example data mining technologies and big vector data processing, data analysis and system security, signal compression and reconstruction, vector computing and telecommunications, and other branches of sciences and advanced information technologies. Development of the theory for robot design allows database downsizing by a list of attribute sets at the same time due to vector binary processing data.
Fundamentals
An n-stage ring sequence K2D= {(k11, k12), (k21, k22), ...,(ki1, ki2),….,(kn1, kn2)}, where we require all terms in each vector-sum to be 2-stage (t=2) sequences together with vectors of the sequence enumerates of coordinate set of a topologically closed two-dimensional grid m1×m2 is called a two-dimensional “Ideal Vector Basis” (2D IVB).
) 3 mod ,2 (mod (0,2) (1,0) (1,2) (0,0) (1,2) (1,1) (0,1) (1,1) (1,0)
≡ + ≡ + ≡ +
For example, the 2D IVB {(1,0), (1,1), (1,2)} gives the next vector sums modulo m1 =2, m2=3:
So long as the vectors (1,0), (1,1), (1,2) of the 2D IVB themselves are two-dimensional (t=2) vector sums also, the modular (m1=2, m2=3) vector sums form a set of two- modular reference grid m1 x m2 = 2 x 3: (0,0) (0,1) (0,2) (1, 0) (1,1) (1,2) Schematic diagram of creating coordinate grid 2×3 generated by Ideal Vector Basis {(1,0),(1,1),(1,2)} is given below (Figure 1).
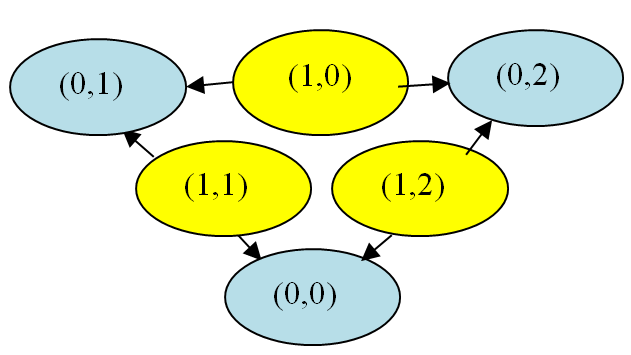
Diagram (Figure 1) consists of two three-stage (n=3) sequences of 2-stage (t=2) sub-sequences placed inside another, so that inner sequence is the 2D IVB {(1,0), (1,1), (1,2)} (yellow beads), while the outside one forms the rest 2D vectors by summing modulo 2 and 3 of 2D vectors {(0,1),(0,2),(0,0)} (blue beads). The arrows point to the summing giving locations of all modular sums in the ring diagram. We can observe that each modular sum from (0,0) to (1,2) occurs exactly once on the diagram. Table 1 demonstrates optimized two-dimensional binary code, based on the 2D IVB {(1,0), (1,1),(1,2)} with informative parameters S=7, n=3.
| S.no | Vector | Digit Weights of the 2D Code | ||
|---|---|---|---|---|
| (1,0) | (1,1) | (1,2) | ||
| 1 | (0,0) | 0 | 1 | 1 |
| 2 | (0,1) | 1 | 1 | 0 |
| 3 | (0,2) | 1 | 0 | 1 |
| 4 | (1,0) | 1 | 0 | 0 |
| 5 | (1,1) | 0 | 1 | 0 |
| 6 | (1,2) | 0 | 0 | 1 |
| 7 | (0,0) | 0 | 0 | 0 |
| 8 | (1,0) | 1 | 1 | 1 |
Table 1: Optimized two-dimensional (t=2) binary code, based on the 2D IVB {(1,0), (1,1), (1,2)} with informative parameters S=7,
Table 1 defines two-dimensional (t=2) binary code system under a torus surface coordinate grid m1× m2 =(n–1)×n = 2×3 with two ring axes m1=2, and m2=3. Here is an example of code system design, using the combinatorial optimization systems theory prospected from rotational symmetry of order seven (S=7) [1]. The next example belongs design of an optimized data system processing two (t=2) sets of category attributes concurrently under a torus surface coordinate grid m1× m2 = 2×3.
Table 2 contains 2n=8 binary 2D vector 3-digit (n=3) combinations for coding 2n-2=6 distinct two-dimensional (t =2) data sets both with two (m1=2) attributes of the first, and three (m2=3)-the second category concurrently. In the general case, an optimized multidimensional data system processing based on t-dimensional IVB {(k11, k12,…,k1t), (k21, k22,...,k2t),…(kn1, kn2,...,knt)} provides vector data coding sets of category attributes concurrently under a coordinate grid m1× m2 ×…×mt. The underlying system provides vector data processing for robot design with vector- weighed binary code of nearly 2n code size.
| No | Category | Digit Weights of the 2D Code | |||
|---|---|---|---|---|---|
| 1 | 2 | (1,0) | (1,1) | (1,2) | |
| 1 | 0 | 0 | 0 | 1 | 1 |
| 2 | 0 | 1 | 1 | 1 | 0 |
| 3 | 0 | 2 | 1 | 0 | 1 |
| 4 | 1 | 0 | 1 | 0 | 0 |
| 5 | 1 | 1 | 0 | 1 | 0 |
| 6 | 1 | 2 | 0 | 0 | 1 |
| 7 | 0 | 0 | 0 | 0 | 0 |
| 8 | 1 | 0 | 1 | 1 | 1 |
Table 2: Optimized data system processing two (t=2) sets of category attributes concurrently under a torus surface coordinate gri
Conclusion and Outlook
The objectives of the proposed project are a development of the theory for robotic technology providing ability to process data arrays in streaming mode by lists of attribute sets at the same time, ability to update completed tables with indexing of names, packages, procedures, etc. in the selected coordinate database, followed by processing in the database network. Data arrays can be described by multidimensional sets of attributes of arbitrary content at any level of indexing and theoretically infinitely by a large number of attribute categories. Encryption of the processed data, for example, periodic renaming of coordinate axis numbers, reinsertion of vector weights, etc. for increasing the level of protection against unauthorized access when channeling through communication channels of converting multidimensional signals for robotic design. The prospects for the development of vector information technologies are opened based on the minimization of the basic structure of multi-dimensional information flow processing systems and the functionality of vector computer systems is expanded. At last, optimum vector combinatorial systems theory discovers direct application of the underlying scientific approach for robot design for development perspective R&S research in contemporary vector information technologies, computing, systems engineering, and education. The processing of multi-dimensional data sets on the minimized basis of a t-dimensional coordinate system opens up prospects for the development of vector systems applied theory for robotic technologies as an alternative to quantum ones.
References
-
Hall M (1998) Combinatorial Theory. 2nd(Edn.), John Wiley & Sons, USA.
-
Xiaochuang Y, Guoqing L (2018) Big spatial vector data management: a review. Big Earth Data 2: 108-129.
-
Chi M, Plaza JA, Benediktsson, Sun J, Shen, et al. (2016) Big data for remote sensing: Challenges and opportunities. IEEE 104(11): 2207-2219.
-
Ma Y, Wu H, Wang L, Zomaya A, Jie W (2015) Remote sensing big data computing: Challenges and opportunities. Future Generation Computer Systems 51: 47-60.
-
Pekturk MK, Unal M (2017) A review on real-time big data analysis in remote sensing applications. 25th Signal Processing and Communications Applications Conference (SIU), Antalya, Turkey.
-
Bose NK (2017) Applied Multidimensional Systems Theory. Springer Int Publishing, Pennsylvania State University State College, USA, pp: 192.
- Group Consensus of Nonlinear Hybrid Multi-Agent Systems with Self-Triggering Event Mechanism
- Optimum Vector Combinatorial Theory and Its Applications
- Manifold Systems Applied Theory for Innovative Robotic Technology
- Collaborative Robots: Human-Robots Coexistence in Industrial Environments
- Utilizing Idle Time for Job Clusters Reduces Inventory and Total Job Completion Time for Single Machine Scheduling
- Embracing the Future of Robotics with ART