Relations between Visual Axis and Upper Extremity Motion during Eating in Healthy People: Correspondence of Eye Movement Pattern and Velocity Curve
Aim: Eye-hand coordination that occurs when an object gets closer to the body, as with eating motion, is unclear. we conducted a synchronization analysis of the visual axis and upper extremity motion using a spoon and chopsticks in healthy volunteers. The central aim of this study was to examine relations between the visual axis and upper extremity motion during eating. Methods: Participants were 12 healthy volunteers (4 men, 8 women) who were 20 - 49 years old. The participant carried the sponge cake from the plate to the mouth with a spoon or chopsticks. The upper extremity position at which the visual axis was removed from the food was designated as the critical visual point. The upper extremity motion velocity was chosen as an index. Results: The upper extremity motion show a bell-shaped velocity profile of the wrist during eating. When carrying the sponge cake from plate to mouth with a spoon, the visual axis remained on it after peak velocity. With chopsticks, the visual axis was kept on sponge cake for at least 0.19 s. Conclusion: Results show that visual guiding of upper extremity motion until the critical visual point is necessary for efficiency during eating. Additionally, this study speculate that the central nervous system extends a visual monitoring period in eating motion with a spoon compared to chopsticks and that it prevents dropping of food. This finding provides a basis for occupational therapists and physiotherapists to assist people who need guidance in eating motions.
Introduction
Because of influences such as cerebrovascular accident and head injury, simple motions (eating motion) such as carrying food from a plate to a mouth sometimes cannot be accomplished smoothly.
Smooth eating motion is executed when the velocity curve of the upper extremity motion shows a bell shape [1]. In the circumstances described above, a person tends to drop food from a spoon or chopsticks during the eating motion. Difficulty in upper extremity motion control attributable to a disorder of motor function can be an important factor. However, even if upper extremity motion is smooth, cases of food dropping persist. Problems of eye-hand coordination must be resolved to improve eating skill. As examples, cases of dropped food can result from failure to fix vision on foods, or on a spoon or chopsticks carrying food to the mouth.
Eye-hand coordination (or hand-eye coordination) is the coordinated control of eye movement with hand motion, with processing of visual input to guide reaching and grasping by proprioception of the hands to guide the eyes. Reported factors affecting eye-hand coordination include eye-hand coordination in object manipulation [2], patterns of hand motion during grasping and the influence of sensory guidance [3], visual memory and motor planning in a natural task [4], proprioceptive guidance of saccades in eye-hand coordination [5], flexibility in intercepting moving objects [6], differences in fixations between grasping and viewing objects [7], preparing coordinated eye and hand movements [8], grasping with the eyes [9], and eye-hand coordination skills in children with and without amblyopia [10].
However, eye-hand coordination that occurs when an object gets closer to the body, as with eating motion, is unclear. Before clinical research, when the subject took juice with a spoon, in which amount was changed randomly, from a plate on a desk, the speed and the elapsed time and the position of the spoon were measured, in addition to the upper extremity position at which the visual axis was removed from the cup of the spoon (Critical Visual Point; CVP) [11]. More attention would be devoted to the cup of the spoon over a longer period of time if the distance of CVP from the eye were decreased with an increasing amount of juice in the spoon [12]. However, the distances of CVP recorded in 19 subjects were quite large among the subjects, ranging from 18 cm to 36 cm, for a barely filled 0.1 spoon, while the distance of CVP of each subject was reduced slightly when the amount of juice of the spoon was increased. Therefore, we conducted a synchronization analysis of the visual axis and upper extremity motion using a spoon and chopsticks in healthy volunteers. The central aim of this study was to examine relations between the visual axis and upper extremity motion during eating.
Subjects and Methods
Participants
Participants were 12 healthy volunteers (4 men, 8 women) who were 20 - 49 years old (mean 28 years; standard deviations, SD 11 years). They had normal vision sufficient for obtaining a driving license, color sense, right hand dominance, and affiliated psychic function. None had any disease or injury to impair daily living activities.
Ethical Considerations
All participants gave their informed consent to the experimental procedures, which were approved by the Ethics Committee of Yamagata Prefectural University of Health Sciences (1103-15), Yamagata, Japan.
Instrumentation and Data Acquisition
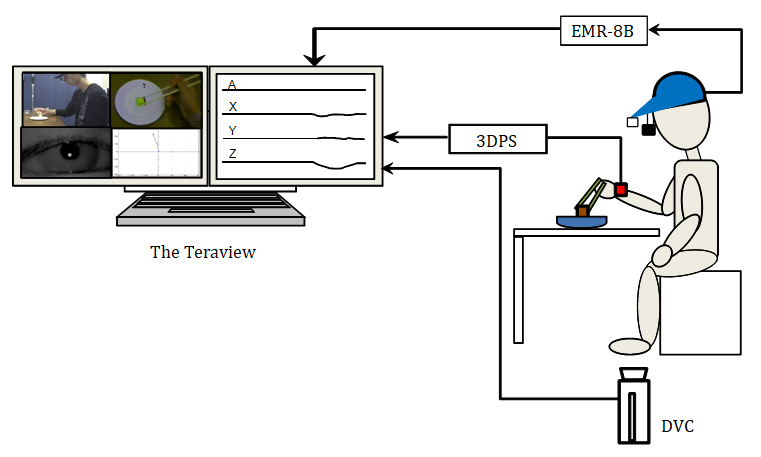
Exploratory eye movements were recorded using an eye tracker (EMR-8B; nac Image Technology, Inc., Tokyo) with a sampling frequency of 30 Hz, which detects infrared reflections from corneas [13, 14]. The eye tracker consisted of an eye camera head unit and a controller attached to the head of a participant. A pupil camera and a field camera were installed in the eye camera head unit. The visual axis position was attached to a picture from the field camera with a controller. The field camera of the head unit did not have a distortion of glasses and used glasses of 62 deg diameter by which a wide image was obtained. The detection precision of upper extremity motion at the desk of a participant was 0.2 deg heartily in 40 deg inside of a circle in a cycloduction axis. The upper extremity motion of the participant used a three-dimensional electromagnetic motion tracking system (Liberty; Polhemus Inc., Colchester) and recorded it with sampling frequency of 100 Hz. This system consisted of a three-dimensional electromagnetic motion tracking system (3DPS). The precision was 0.76 mm. A digital video camera (NV-GS300; Panasonic Inc., Osaka) was used to monitor participant’s motion with 30 frames per second. These data were recorded using a digital motion picture waveform real- time synchronous recording system (The Teraview; Gigatex Co. Ltd., Osaki).
Procedure
The test room illumination was 652 lux. Room temperatures were around 24℃. Participants sat on a chair of 40 cm height. A front table of 80 cm depth, 120 cm width, and 70 cm height with the shoulder flexed to 0‐20 deg of flexion and the elbow flexed to 70‐90 deg of flexion (Figure 1).
Participants held eating implements at the start of the eating task. The eating implements were a spoon (stainless steel, 18.0 cm full length) or chopsticks (disposable wooden, 19.5 cm full length).
The eye camera head unit was put on participant’s head. Furthermore, participant’s right styloid process of the radius was affixed a 3DPS holding the eating implement. A plate (15.0 cm diameter, 3.0 cm depth, white color) was put 30 cm front from the table edge. The experimental food was a piece of sponge cake (2.0 cm3, 1.4‐1.6 g). Instructions for participants were to “eat the food in the same way you eat in daily life”. The eating motion, speed, and accuracy were unrestricted.
Eyes of a participant were masked to prevent intervention of prior visual information. Visual masking was removed at the start of the eating task. The experimental task was finished, when the food was in a mouth of the participant. Participants were advised that “you can spit out the food after putting in your mouth if you do not want to swallow the food.” A bowl was prepared beside the participant. Participants were examined of 10 trials with a spoon and chopsticks.
Data Analysis
Motion Phases Phases of eating tasks were divided into two phases using video data. During phase 1, eating implements (a spoon or chopsticks) moved and picked up the food. The phase ends before eating implements begins to move to the mouth of a participant. In phase 2, eating implements moves to the mouth and arrives at the mouth.
Classification of eye movement From a visual axis position attached to a picture from the field camera, we pursued the visual axis during the eating task. The eye movement was classified in terms of saccadic eye movement (SEM), smooth pursuit eye movement (SPEM), fixation, and others. The SEM defined eye movement of angle speed greater than 50 deg/s. The SPEM defined eye movement to follow food of angle speed less than 50 deg/s. The fixation defined that eye movement inactivity continued longer than 0.10 s [15]. Therefore, the eye mark was stopped at the same position more than three pictures of the field camera. In phase 2, CVP defined the position at which the visual axis was removed from food.
The upper extremity motions were analyzed with used 3DPS data. The plate-to-mouth distance was measured as the difference between the task-starting position and the task- ending position using the 3DPS (distance). The distance and the speed were calculated from the 3DPS position [16]. The upper extremity during the eating motion was calculated the amplitude and time when the upper extremity motion of a participant reached the maximum velocity (MV).
Statistical analysis
The analyzed CVP and MV time data compared the spoon with chopsticks. Statistical processing used Student t-tests for which a significance level of 0.05 inferred as significant.
Results
The plate-to-mouth distances using the spoon and chopsticks in all participants showed 21.6‐28.3 cm and 16.2‐24.3 cm, respectively (Table 1). The necessary times of phase 1 using the spoon and chopsticks in all participants were 1.09‐2.67 s and 0.67‐1.77 s. The motion pattern of phase 1 showed difference in each participant with both eating implements. The necessary time of phase 2 using the spoon and chopsticks in all participants showed 0.98‐1.83 s and 0.58‐1.59 s, respectively. The motion velocity pattern showed a bell shape in all participants with both eating implements.
The visual axis position using the spoon and chopsticks in one participant is shown in Figure 2. Using the spoon, the visual axis showed SEM after about 0.20 s from the task start, and moved to the plate. Next, the visual axis moved to the food after about 0.17 s. The visual axis remained fixed on the food for about 1.60 s. During this time, the food was picked up in the spoon bowl. The necessary time of phase 1 was 2.07 s. In phase 2, the visual axis showed SPEM to follow with food from the start of eating motion. The spoon moved toward the mouth after about 0.70 s, the visual axis was diverted from the food (CVP). The necessary time of phase 2 was 1.03 s.
Using the chopsticks, the visual axis showed SEM after about 0.17 s from the task start, and moved to the plate. Next, the visual axis moved after about 0.17 s to food. The visual axis was kept fixed on the food for about 0.96 s. During this time, the food was picked up with chopsticks. The necessary time of phase 1 was 1.37 s. In phase 2, the visual axis showed SPEM to follow with food from the start of eating motion. The chopsticks moved toward the mouth after about 0.30 s, the visual axis was removed from the food (CVP). The necessary time of phase 2 was 0.77 s.
| Subject | Plate-to-mouth distance (cm) | Phase1 (s) | Phase2 (s) | |||
|---|---|---|---|---|---|---|
| Spoon | Chopsticks | Spoon | Chopsticks | Spoon | Chopsticks | |
| Mean±SD | Mean±SD | Mean±SD | Mean±SD | |||
| A | 24.8 | 22.8 | 2.21±0.74 | 1.20±0.18 | 1.83±0.12 | 1.59±0.24 |
| B | 25.6 | 20.1 | 1.92±0.48 | 1.10±0.19 | 1.13±0.09 | 0.90±0.02 |
| C | 25.3 | 23.5 | 1.36±0.40 | 0.73±0.10 | 1.03±0.08 | 0.79±0.07 |
| D | 27.2 | 23.8 | 1.62±0.30 | 0.82±0.12 | 1.34±0.08 | 1.36±0.09 |
| E | 28.3 | 24.3 | 2.66±0.51 | 1.42±0.08 | 1.49±0.10 | 1.14±0.08 |
| F | 23.1 | 17.9 | 2.67±0.73 | 1.51±0.12 | 1.00±0.11 | 0.81±0.05 |
| G | 25.5 | 21.2 | 2.40±0.40 | 1.47±0.28 | 1.30±0.09 | 1.15±0.10 |
| H | 23.6 | 20.4 | 1.46±0.47 | 1.22±0.19 | 1.24±0.15 | 1.04±0.06 |
| I | 27.6 | 21.3 | 2.32±0.82 | 1.77±0.58 | 1.12±0.14 | 0.79±0.04 |
| J | 21.8 | 16.2 | 1.09±0.30 | 0.93±0.26 | 0.98±0.04 | 0.58±0.06 |
| K | 23.8 | 20.9 | 1.41±0.20 | 0.67±0.20 | 0.98±0.10 | 0.84±0.07 |
| L | 21.6 | 20.9 | 1.67±0.57 | 0.77±0.11 | 1.20±0.17 | 0.96±0.07 |
| Max | 28.3 | 24.3 | 2.67 | 1.77 | 1.83 | 1.59 |
| Min | 21.6 | 16.2 | 1.09 | 0.67 | 0.98 | 0.58 |
Table 1: Plate-to-mouth distance and time of each phase in each subject. SD, standard deviation
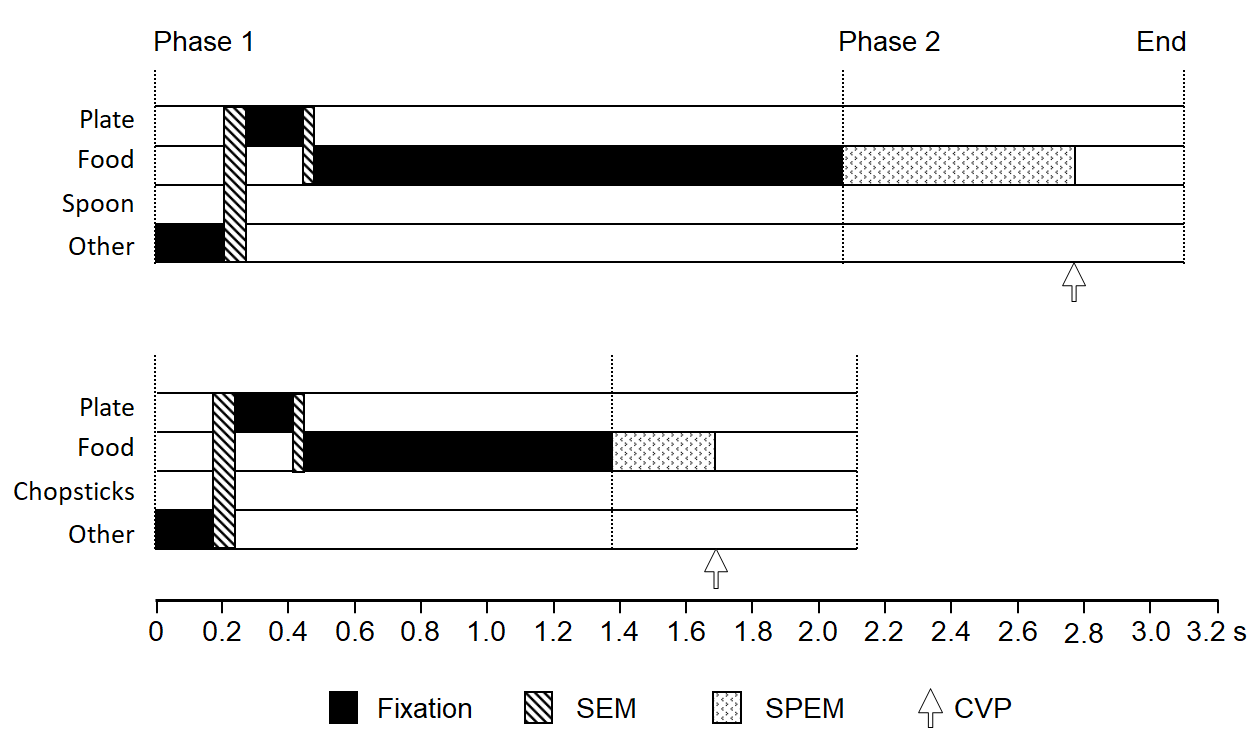
Figure 3 shows the distance curve and the velocity curve using a spoon and chopsticks during eating motion in one participant. Using the spoon, the plate-to-mouth distances was 25.5 cm, and the necessary time of phase 2 was 1.03 s (Figure 3a). MV was 52.1 cm/s after 0.55 s from the start of the eating motion. CVP was 0.70 s from the start of eating motion, and 0.15 s showed MV late (Figure 3b).
Using the chopsticks, the distance from the plate to the mouth was 23.4 cm. The necessary time of phase 2 was 0.76 s (Figure 3c). The value of MV was 63.1 cm/s after 0.34 s from the start of eating motion. CVP was 0.30 s from the start of eating motion, and 0.04 s of MV showed early (Figure 3d).
Figure 4 shows a superimposition of 10 trials for the velocity curve using a spoon and chopsticks in one participant. Using the spoon, each velocity curve was bell- shaped (Figure 4a). The value of MV was 32.7‐55.7 cm/s, and the time that it reached MV from the start of eating motion was 0.39 - 0.67 s. The CVP was 0.43 - 0.80 s after the start of eating motioned.
Using the chopsticks, each velocity curve was bell- shaped (Figure 4b). MV was 50.6‐63.1 cm/s, and the time that reached MV from the start of eating motion was 0.32‐0.44 s. The CVP was 0.27‐0.43 s after the start of eating motioned.
The MV and CVP values are shown in Table 2 for using a spoon in each participant. The average MV of each participant was 31.2‐48.0 cm/s. The time average of each participant that reached MV from the start of the eating motion was 0.47‐0.71 s. The average CVP of each participant was 0.45‐0.88 s after the start of the eating motion. Comparison of the time average among participants for MV and CVP from the start of eating motion showed that MV was significantly earlier than CVP in 7 out of 12 participants (p<0.05, p<0.01, respectively). The time average of each participant showed no significant difference between MV and CVP in the four participants. Furthermore, MV was significantly later than CVP in one participant (p<0.01).
The MV and CVP values are shown in Table 3 for using chopsticks in each participant. The average MV of each participant was 30.1‐56.5 cm/s. The time average of each participant that reached MV from the start of eating motion was 0.32‐0.64 s. The average CVP of each participant was 0.19‐0.55 s after the start of eating motion. Comparison of the time averages of participant between MV and CVP from the start of eating motion showed that MV was significantly later than CVP in 9 participants out of 12 (p<0.05, p<0.01, respectively). The time average of participant showed no significant difference between MV and CVP in three participants.
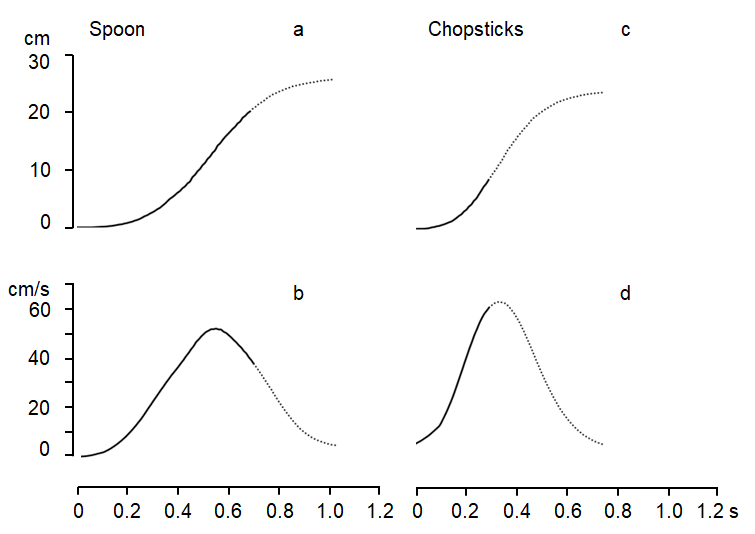
Figure 3: Distance curve and velocity curve of eating motion using a spoon and chopsticks in Subject (C). Left panel shows the distance curve and the velocity curve with using a spoon. Right panel shows the distance curve and the velocity curve with using chopsticks. Horizontal axis shows the time (s), and vertical axis shows the distance (cm) and the velocity (cm/s). The solid lines represent the visual axis on the food, and dotted lines non visual axis on the food.
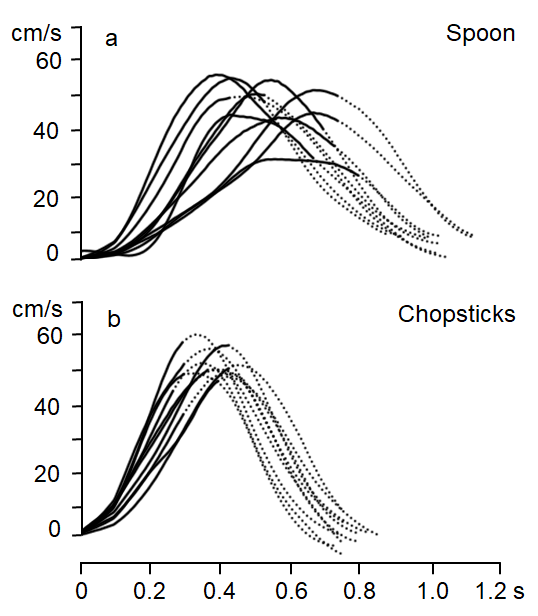
Figure 4: Superimposition of velocity curves of phase 2 using a spoon and chopsticks in Subject (C). Top panel shows the distance curve and the velocity curve with using a spoon. Bottom panel shows the distance curve and the velocity curve with using chopsticks. Horizontal axis shows the time (s), and vertical axis shows the velocity (cm/s). Solid lines represent the visual axis on the food. Dotted lines represent non visual axis on the food.
Discussion
Eye movement pattern by difference of eating implements
In Figure 2, even if eating implements differed, the eye movement patterns were similar. We chose food for which eating motion was possible using either of the two implements. In the studies, the eye movement pattern obtained when subjects drank juice with a spoon presented SEM immediately before CVP. It was an almost identical duration with the start time of horizontal manipulation of a spoon by a hand [11]. The role of SEM is rapid eye movement to catch an object in peripheral vision in the fovea centralis retinae. However, SPEM is smooth eye movement to continue tracking an object moving in space slowly in the fovea centralis retinae [17]. Juice is more easily affected by gravity than the sponge cake because of the gradient of the spoon. Therefore, it is easier to spill juice than sponge cake. We infer that juice necessitates a horizontal motion to be highly precise during eating motion in comparison with sponge cake. This report presents the speculation that SEM occurred in fovea centralis retinae, for which the resolution was high, to watch it over a spoon bowl.
The SPEM shortest times of eating motion using a spoon and chopsticks were 0.45 s and 0.19 s, respectively. Usually, the simple reaction time is the shortest during deliberate motions of humans. A simple visual reaction time is about 0.20 s and the simple visual reaction time is shortened by exercise [18]. This time is equivalent in indispensability time from visual information processing to a motion start. However, it is assumed that P300 of the event related potential appears in about 0.30 s after stimulation because a subject tries a task with care to target stimulation. The appearance time of P300 is delayed by a difficult task. Therefore, we speculate that SPEM during eating motion presented an active affiliation discrimination mechanism after the visual cortex.
Velocity curve in eating motion and reproducibility
In Figure 3, the velocity curve of eating motion using a spoon and chopsticks showed a bell shape. This shape resembled that described in a report of eating motion with a spoon using a three-dimensional movement analysis device [1]. In addition, the velocity curve showed a bell shape in eating motion using chopsticks. This is similar to the motion of drinking water in a glass [19, 20, 21, 22]. These results suggest that the speed transition of eating motion shows a bell-shaped velocity curve irrespective of eating implements and foods. The velocity curve MV is wider with a spoon in comparison to that with chopsticks, but the reproducibility is good in Figure 4. In the upper extremity motion that did not prescribe motion speed of eating motion, patterning of motion speed was shown, and resembled that of an experiment using a monkey with a random manipulation utensil [23]. By this experiment, the trained monkey moved with elbow flexion and extension in 0.40 s. The results suggest that the firing rate of a cerebellar Purkinje cell expressed muscle action of a single joint movement or force. This study conducted our experiments at voluntary speed. It was 0.98‐1.83 s using the spoon, 0.58‐1.59 s using the chopsticks, each of which was slower than the report described above. However, this study suggest that it was an expression of kinetic data (position and speed) learned in the cerebellum by resemble the spoon and chopsticks, and having a bell-shaped velocity curve. In other words, the eating motion in itself is automated by past learning and suggests that the motion program to a mouth is already decided by the motion baseline.
Relationships between MV and CVP
In Table 2, which shows data of a velocity curve of eating motion using a spoon, most subjects turned the visual axis to food to the maximum velocity of upper extremity motion. However, the visual axis for subjects of 75% removed from food significantly earlier than MV using the chopsticks. The period during which the visual axis was located on food was 0.19‐0.55 s (Table 3). Monitoring by visual information is unnecessary if upper extremity motion is automated. However, the fact remains that the visual axis tracks the food for several hundred milliseconds. In contrast, the monitoring system of quick motion shows a bell-shaped velocity curve. It is speculated that this does not revise motion within the operation [24]. The CVP and the MV differed between those obtained when using the spoon and when using chopsticks. The reason that this difference occurs is the difference of somatosensory information obtained through eating implements. Eating motion with a spoon necessitates holding a spoon ball horizontally to avoid dropping food, and carrying it to the mouth. In contrast, we can use positional information for food obtained somatosensorily from the tips of chopsticks when we control food with chopsticks. When we pick up an object with our fingers, the central nervous system (CNS) predicts appropriate power based on information from vision. Then it outputs the information. The pinch of an object is continued afterwards by biofeedback, mainly somatosensory feedback [25, 26]. Results of this study suggest that food pinching was controlled in eating motion using chopsticks by a similar regulatory mechanism. Additionally, this study speculate that CNS extends a visual monitoring period in eating motion with a spoon compared to chopsticks and that it prevents dropping of food. Result of robot-assisted eating and caregiver-assisted eating revealed that the visual axis was observed on a spoon during eating from the plate to the mouth [14, 27].
| Subject | Max velocity | CVP Time (s) | Comparison between Max velocity and CVP | |
|---|---|---|---|---|
| Amplitude (cm/s) | Time (s) | |||
| A | 31.2±3.2 | 0.71±0.08 | 0.88±0.17 | <* |
| B | 44.2±2.9 | 0.52±0.07 | 0.61±0.13 | <* |
| C | 48.0±6.9 | 0.52±0.10 | 0.64±0.12 | <** |
| D | 39.3±2.9 | 0.57±0.09 | 0.72±0.06 | <** |
| E | 41.7±3.0 | 0.53±0.08 | 0.78±0.08 | <** |
| F | 44.9±2.7 | 0.60±0.10 | 0.66±0.09 | <* |
| G | 39.7±3.9 | 0.67±0.08 | 0.77±0.12 | <** |
| H | 35.0±3.1 | 0.64±0.12 | 0.65±0.13 | n.s. |
| I | 46.3±6.0 | 0.53±0.07 | 0.65±0.17 | n.s. |
| J | 40.0±3.9 | 0.47±0.07 | 0.45±0.15 | n.s. |
| K | 44.0±3.1 | 0.49±0.06 | 0.53±0.08 | n.s. |
| L | 33.3±3.0 | 0.69±0.11 | 0.47±0.10 | >** |
Table 2: Maximum velocity and CVP using a spoon in each subject (Mean±SD). *p < 0.05, ** p < 0.01, n.s. not significant CVP, crit
| Subject | Max velocity | CVP Time (s) | Comparison between Max velocity and CVP | |
|---|---|---|---|---|
| Amplitude (cm/s) | Time (s) | |||
| A | 30.1±6.8 | 0.64±0.12 | 0.55±0.20 | n.s. |
| B | 49.7±3.8 | 0.51±0.04 | 0.37±0.07 | >** |
| C | 56.5±3.9 | 0.38±0.04 | 0.34±0.06 | >* |
| D | 34.5±4.4 | 0.43±0.08 | 0.41±0.16 | n.s. |
| E | 42.7±6.1 | 0.55±0.06 | 0.32±0.10 | >** |
| F | 39.9±5.7 | 0.44±0.07 | 0.43±0.08 | n.s. |
| G | 36.2±4.2 | 0.54±0.06 | 0.32±0.15 | >** |
| H | 35.0±6.3 | 0.61±0.05 | 0.38±0.17 | >** |
| I | 53.2±3.9 | 0.42±0.05 | 0.31±0.12 | >** |
| J | 45.7±5.8 | 0.32±0.07 | 0.19±0.04 | >** |
| K | 46.7±5.2 | 0.45±0.06 | 0.32±0.10 | >** |
| L | 33.7±4.7 | 0.54±0.11 | 0.26±0.07 | >** |
Table 3: Maximum velocity and CVP using chopsticks in each subject (Mean±SD) *p < 0.05, ** p < 0.01, n.s. not significant CVP, cr
These results suggest that visual guiding of upper extremity motion until CVP is necessary for efficiency during eating. This finding provides a basis for occupational therapists and physiotherapists to assist people who need guidance in eating motions.
Study limitations
This study was conducted with healthy subjects as a synchronization analysis of visual axis and upper extremity motion using a spoon. Results show that eating motions of a healthy subject were automated. The CVP was used during eating motion in all trials of all subjects. However, no comparison was made with a handicapped subject in eye- hand coordination. Therefore, it remains unclear whether CVP is related to dropped food from eating implements. In the future, we would like to investigate eating motions and eye-hand coordination with a handicapped people.
Conclusion
The central aim of this study was to examine relations between the visual axis and upper extremity motion during eating. Results show that visual guiding of upper extremity motion until the critical visual point is necessary for efficiency during eating. Additionally, this study speculate that CNS extends a visual monitoring period in eating motion with a spoon compared to chopsticks and that it prevents dropping of food. This finding provides a basis for occupational therapists and physiotherapists to assist people who need guidance in eating motions.
Conflict of Interest
The authors declare that they have no conflict of interest.
Acknowledgments
The authors thank Professor Toshiaki Sato for their valuable suggestions for this study and students of Yamagata Prefectural University of Health Sciences for their excellent assistance.
Funding
Not applicable
References
-
Van der Kamp J, Steenbergen B (1999) The kinematics of eating with a spoon: bringing the food to the mouth, or the mouth to the food? Exp Brain Res 129(1): 68-76.
-
Roland J, Goran W, Anders B, Randall JF (2001) Eye-hand coordination in object manipulation. J Neurosci 21(17): 6917-6932.
-
Marco S, Martha F, John FS (2002) Patterns of hand motion during grasping and the influence of sensory guidance. J Neurosci 22(4): 1426-1435.
-
Mary M, Anurag S, Ryan M, Jeff BP (2003) Visual memory and motor planning in a natural task. J Vis 3(1): 49-63.
-
Ren L, Khan AZ, Blohm G, Henriques DYP, Sergio LE, et al. (2006) Proprioceptive guidance of saccades in eye hand coordination J Neurophysiol 96(3): 1464-1477.
-
Eil B, Jeroen BJS (2007) Flexibility in intercepting moving objects. J Vis 7(5): 1-17.
-
Anne Marie B, Volker HF, Karl RG (2009) Differences in fixations between grasping and viewing objects J Vis 9(1): 1-24.
-
Donatas J, Torsten S, Heiner D (2010) Preparing coordinated eye and hand movements: Dual-task costs are not attentional J Vis 10(14): 1-17.
-
Ettore A, Marcello C, Corrado S (2011) Grasping with the eyes. J Neurophysiol 106(3): 1437-1442.
-
Catherine MS, Dean RM, Alison LF, John JS, Simon G (2011) Eye Hand Coordination Skills in Children with and without Amblyopia. Invest Ophthalmol Vis Sci 52(3): 1851-1864.
-
Sasaki S, Suzuki Y, Nito M, Kawakatsu Y, Fujii H (2013) Contribution to visual axis by upper extremity motion during eating in the healthy humans; survey on various amounts of juice of the spoon during eating. J Jap Occup Ther Assoc 32: 64-74.
-
Suzuki Y, Fujii H, Nikara T (2009) Many other attentions besides the visual attention are evoked within the duration of the visual axis kept on the object. The 36th International Congress of Physiological Sciences (IUPS2009).
-
Nito M (2011) Relations between visual axis and upper extremity motion during eating in healthy subjects; correspondence of eye movement pattern and velocity curve. Master thesis of Yamagata prefectural University of Health Sciences.
-
Suzuki A, Takahashi Y, Nito M, Suzuki K, Fujii H (2016) Visual axis analysis during unassisted eating and robot- assisted eating. Asian Occup Ther 11(1): 43-52.
-
Manor BR, Gordon E (2003) Defining the temporal threshold for ocular fixation in free-viewing visuocognitive tasks. J Neurosci Methods 128(1-2): 85- 93.
-
Xiao X, Hu H, Li L, Li L (2019) Comparison of dominant hand to non-dominant hand in conduction of reaching task from 3D kinematic data: Trade-off between successful rate and movement efficiency. Mathematical Biosciences and Engineering 16(3): 1611-1624.
-
Suzuki Y, Fujii H, Sato T, Sasaki S, Fukuda E (2011) Eye hand coordination during eating among healthy people. J Jap Occup Ther Assoc 30: 422-431.
-
Boron WF, Boulpaep EL (2005) Medical Physiology Updated ed., (Philadelphia, Elsevier Saunders): 325-342.
-
Ghuntla TP, Mehta HB, Gokhale PA, Shah CJ (2014) Influence of practice on visual reaction time. J Mahatama Gandhi Institute of Medical Sciences 19(2): 119-122.
-
Reyes Guzman A, Gil Agudo A, Penasco Marta B, Solis Mozos M, Ama Espinosa A (2010) Kinematic analysis of the daily activity of drinking from a glass in a population with cervical spinal cord injury. Journal of Neuro Engineering and Rehabilitation 7: 7-12.
-
Alt Murphy M, Willen C, Sunnerhagen KS (2012) Movement Kinematics During a Drinking Task Are Associated With the Activity Capacity Level After Stroke. Neurorehabilitation and Neural Repair. 26(9): 1106- 1115.
-
Kim K, Song WK, Lee J, Lee HY, Park DS, et al. (2014) Kinematic analysis of upper extremity movement during drinking in hemiplegic subjects. Clinical Biomechanics 29(3): 248-256.
-
Alt Murphy M, Murphy S, Persson HC, Bergstrom UB, Sunnerhagen KS (2018) Kinematic analysis Using 3D Motion Capture of Drinking Task in People with and Without Upper-extremity Impairments. J Vis Exp 133: 1-9.
-
Yamamoto K, Kawato M, Kotosaka S, Kitazawa S (2007) Encoding of movement dynamics by purkinje cell simple spike activity during fast arm movements under resistive and assistive force fields. J Neurophysiol 97(2): 1588- 1599.
-
Cheng DT, Luis M, Tremblay L (2008) Randomizing visual feedback in manual aiming: reminiscence of the previous trial condition and prior knowledge of feedback availability. Exp Brain Res 189(4): 403-410.
-
Gordon AM, Westling G, Cole KJ, Johansson RS (1993) Memory representations underlying motor commands used during manipulation of common and novel objects. J Neurophysiol 69(6): 1789-1796.
-
Suzuki Urayama A, Takahashi Y, Nito M, Suzuki K, Fujii H (2022) Kinetics of Visual Axis and Pupil Diameter during Caregiver assisted Eating. Asian J Occupat Ther in press.
- Electrolyte Considerations for Athletes
- Comprehensive Rehabilitation in Adults with Diabetic Peripheral Neuropathy: A Literature Review on Frequency, Intensity, and Duration Parameters
- Exercise Duration and Its Association with ADHD Symptom Severity in Children and Adolescents: A Parent-Reported Survey Study
- Adaptation of the Adult Neurophysiology of Pain Questionnaire for Use in Pediatrics
- A Non-Pharmacological Multidisciplinary Pain Program within a Hospital Wellness Program: A Mixed Methods Study
- The Effect of Frenkel's Exercise with PNF on Functional Reach in Stroke Survivors: A Randomized Control Trial