Development of an Autonomous Multifunctional Fruits Harvester
There is global shortage of food production due to inadequate workforce, to carry out crop production. This study strived to develop an autonomous system, which can harvest more than one type of crop with high accuracy to improve effectiveness, and minimized production and operational costs. To minimize the mechanical damage done to the fruits during the harvesting and handling operations, the system combined the mechanical properties and optical properties of the fruits during operation. Sensor was attached to the fruits collection container system to prevent overloading of the container, hence protecting the fruits from mechanical stresses. Results obtained for the laboratory trial revealed that the prototype robotic system had a higher performance (about 90%) when tested with pepper fruits, when compared with the performance rating (about 85%) recorded with eggplant fruits. It was also observed from the laboratory trials that the robotic system aborted the harvesting operation, whenever the weight of the fruits collection container exceeded the preset maximum permissible weight. The relatively high success rates recorded from the prototype results signified significant improvement in the development of autonomous multipurpose harvesters, using advanced technologies and robust data to produce a commercially viable automated fruits harvester.
Introduction
Increasing food production to feed about 821 million hungry people in the world had become a major concern [1]. A lot of field operations in involved in agricultural production, in order to a successful crop production, with high crop yield. Shortage of labour force to perform the various field operations is one of the factors hindering crop production globally; hence automating the various field operations will help to boost food production. Automation of agricultural field operations involved disintegration and transformation of the operations into discrete robotic functionalities [2, 3]. Automated vehicles had become an exciting technology in modern farming business, as it help to shore up the shortage of labour force experienced during crop production. Integration of several digital systems, sensors, control technologies, etc. has accelerated the design and developments of advance robotic (automated) systems for various agricultural operations [4]. Robotic system takes a lot of skills and ideas to develop, as it required the incorporation of several subsectors, such as: fruit detection, plant morphological structure, machine motion planning, dexterous manipulation, mechanical properties of the fruits, etc [5, 6, 7]. Agricultural products have heterogeneous and anisotropic properties, which impose great challenges to most agricultural robots, when carrying out delicate tasks like fruit harvesting, sorting and grading operations, etc [4, 8]. According to the Food and Agriculture Organization, automating the agricultural sector require major transformations of farming systems, rural economies, and natural resource management [9].
To develop a robotic system, a comprehensive study of the crop and cropping environment must be conducted, to optimize the performance of the system. Therefore, the robot system should be lightweight, autonomous, safety of the crops and adaptability to perform any specific task effectively [10, 11]. Most agricultural robots designers [12, 13, 14] focused on the following factors: vision-based control, advanced image processing techniques, gripper design, and navigation algorithms, for during the production of either single task or multipurpose automated systems. Lehnert, et al. [5] designed and develop an autonomous harvesting robot for sweet pepper fruit, planted in a protected cropping environment. The harvesting robot was able to address three key challenges in automated fruit harvesting operation, which are: fruit detection, grasping method and manipulation [15, 16]. Develop an autonomous phenotyping robot which used light penetration, leaf erectness, leaf necrosis and Green-Red Vegetation Index to detect the stalk direction of sorghum plant in the field.
According to Feng, et al. [17] most of the existing harvesting robots are developed for high-value and perishable/delicate crops, which can suffered from deterioration is harvesting is delayed, due to shortage of workforce or high labor cost. To enhance the performance of harvesting robots, they are equipped with two major fruit picking devices, which are: grippers and suction mechanisms. Gripper comprises of rigid joints and links, which is used to grasp the fruit before harvesting, and conveying the harvested fruit safely to the storage box. While the suction device utilize vacuum pressure to singulate the fruit, and pull, hold/twist the fruit during the harvesting process [18]. Although several autonomous agricultural systems have been developed during the past two decades, but their utilization in agricultural operations is still in the early stage; this is due to lack of adequate information that will help in their optimization [6, 19, 20]. Literature reviews [15, 21, 22] had shown that most of the existing harvesting robots are tailored to harvest only one crop cultivar. There is no harvesting robot that can harvest various types and cultivars of fruits. The aim of study is to design and develop a prototype of multipurpose autonomous system (robot) that can be used to harvest various pepper and eggplant cultivars fruits. This robot will reduced the number of fruits harvesting robots operating the filed, since one robot can harvest more than one crop. Eggplant and bell pepper cultivars were chosen as the target because their morphological structure (plant height, branches, leave size, fruits size and fruit shape) look similar.
Materials and Methods
Robotic system compositions and workflow
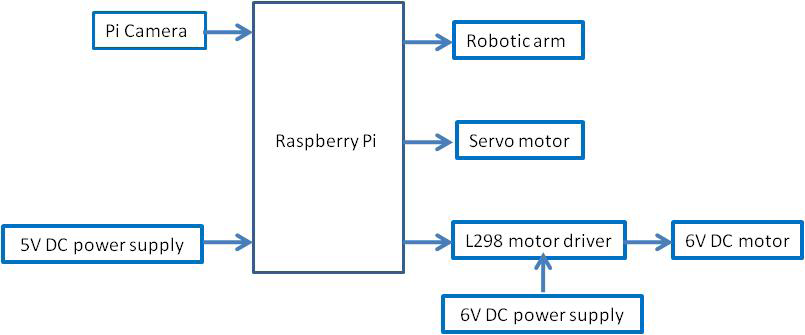
Composition of the robotic system: The autonomous vehicle will be light-weight, small and flexible, so that it can maneuver through the field causing little damage to the crops and the soil texture. It consists of a harvesting system, microcontroller, a navigation system, a storage box, and a Pi camera. The Raspberry Pi which works on 5V/2.5A DC is the heart of this agricultural robot. This robotic system is capable of harvesting different cultivars of bell pepper and eggplant fruits planted under different farming methods. The robot is powered by Lipo battery. During harvesting operation, Raspberry Pi controller co-ordinates the navigation mechanism, while the DC motors provide rotary motion to the wheels. The image processing mechanism and the robotic arm helped in the fruit harvesting and collection. The block diagram of the robotic system is presented in Figure 1.
Workflow of the robotic system: The robot moves along the farm with the aid of the navigation system, while the vision system attached to the robotic arm detect if the bell pepper fruit or eggplant fruit is matured for harvesting. During fruit harvesting, the Pi camera detects the maturity stage of the fruits by using the image processing technique. Once a matured fruit is detected, the robot establishes its spatial position, and the robotic gripper will be guided by the robotic arm to the targeted fruit. Then the gripper will clamped the bell pepper fruit, by applying the appropriate compression force, suitable for the fruit. The fruit is detached from the plant and conveyed it to the storage container. Upon arrival at the storage container, the robotic arm will placed the fruit gently in a horizontal orientation. After each fruit harvest, the robotic arm will reset awaiting the next harvesting operation, if the storage container can accommodate more load.
The gripper used for this robotic harvester is modified so that it should applied precise appropriate force on the fruit, during the harvesting and conveying (handling) operations. This is to minimize mechanical stress on the fruits, which can lead to mechanical damage, since some cultivars of pepper and eggplant fruits are fragile. According to Akpokodje and Uguru, et al. [23] and Ijabo, et al_._ [24], plant cultivar, farming method and harvesting period are some of the crucial factors that affect the amount of compression force a fruit can absorb before rupturing. The compressive force applied by the gripper on the fruits is based on fruit type and fruit cultivar. Data used to program the robotic system were obtained from research results [25, 26, 27, 28] and the authours’ field work.
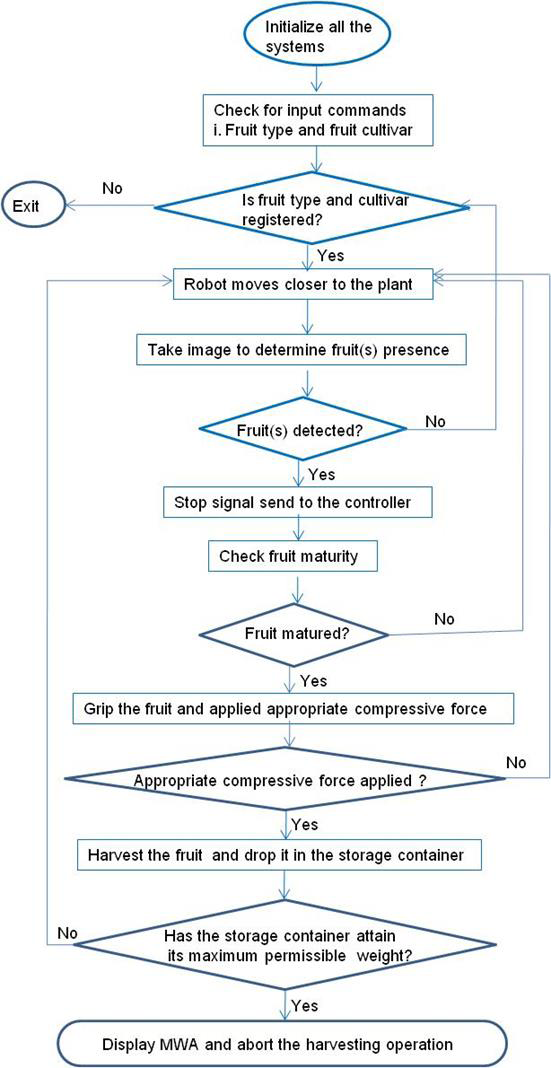
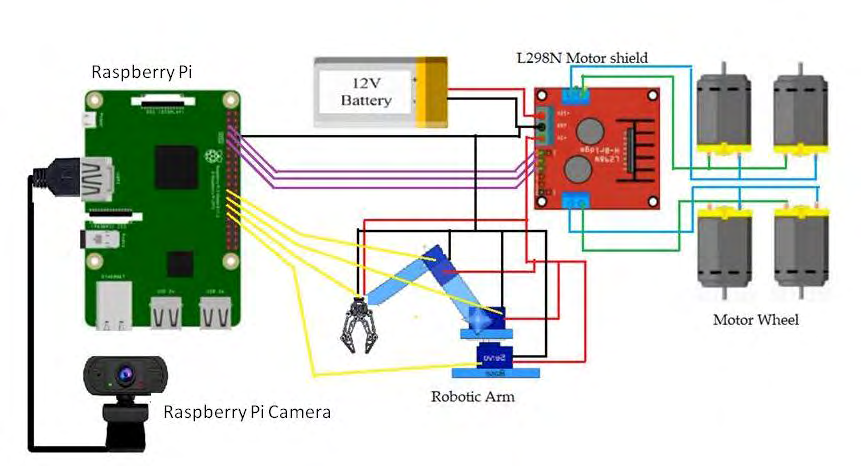
One unique feature of this harvesting robot is the special attention paid to the fruits collection (storage) container. It was designed and fitted with a sensor, so that it can accommodate only preset weight of fruits. If the maximum permissible weight had been attained, the robotic system will then signaled the farmer, displays maximum weight attained (MWA) on the screen and stop harvesting operation. This is to avoid rupturing of the harvested fruits placed at the bottom layer of the container. The control flowchart presented in Figure 2 summarized the procedure of the fruits harvesting robot. The Figure 4 showed that the basic architectural structure of the robotic system.
Some essential hardware used for the development of robotic system
Robotic Arm: This is a mechanical system that operates in a similar manner as a human arm (Figure 4).

Robotic arm anthropomorphically reflects the human arm in its mode of operation, which is controlled by sensors [29]. The robotic arm carried the grippers that grasp the fruit before it is harvested from the plant, and the camera which captured the image of the fruit to determine its maturity.
Russel, et al. [30] state that the robotic arm is an essential part of fruit harvesting robots, as it controls the end effector. The end effector interacts with the fruits, hence determining the amount of handling force to be applied. Servo Motor: This is a special Direct Current (DC) motor which allowed precision control in terms of the angular position, speed and acceleration (Figure 5). Hence, it is equipped with a servo mechanism for precision control and position [31, 32].

Raspberry Pi 3 Model B+: This is the latest Raspberry Pi 3 product. It boasts a 64-bit quad core processor that runs at a speed of 1.4GHz (Figure 6). It required an input power supply of 5V/2.5A DC, with a 64-bit SoC processor that runs at a speed of 1.4GHz [33].

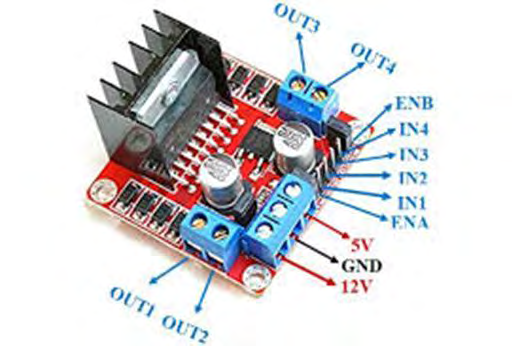
Motor Driver Shield: This is a module for DC motors (Figure 7) which is use Arduino to control the motor’s speed and direction. It is used to produce automated systems, and it is powered either Arduino or an external power source [34].
Raspberry Pi Camera Module V2: This is a high definition camera module, which is compatible with the Raspberry Pi 1, 2, 3 and 4, and can be accessed through the MMAL and V4L APIs [35].

Results and Analysis
Harvesting rate
This robot will operate mainly on the combined mechanical and optical properties of the targeted fruit to be harvested. The harvesting test was performed for 20 times, on two pepper cultivars and eggplant plant cultivars grown in the laboratory. Results obtained from the laboratory trial are presented in Table 1. As seen in Table 1, the harvesting robot performs better in the pepper fruit, irrespective of the pepper cultivar. The lower success rates recorded in the eggplant fruit can be ascribed to be occlusions of the fruits caused by the eggplant leaves, and the tougher eggplant fruit stalk.
| Plant cultivar | Success | Failure | Performance rate (%) |
|---|---|---|---|
| Pepper cultivar 1 | 18 | 2 | 90 |
| Pepper cultivar 2 | 17 | 3 | 85 |
| Eggplant cultivar 1 | 15 | 4 | 80 |
| Eggplant cultivar 2 | 17 | 3 | 85 |
Table 1: Fruits harvesting rate
Load bearing capacity of the collection container
This test was carried out to determine the rate at which the harvesting operation was aborted, after the fruit collection container had attained its maximum permissible weight. The test was done in 20 harvesting times. Results obtained from the laboratory trial test are presented in Table 2. The presented shown in Table 2, revealed high success in the rate in which the harvesting robot aborted operation, after attaining the maximum permissible weight.
| Plant cultivar | Success | Failure | Performance rate (%) |
|---|---|---|---|
| Pepper cultivar 1 | 19 | 1 | 95 |
| Pepper cultivar 2 | 20 | 0 | 100 |
| Eggplant cultivar 1 | 20 | 0 | 100 |
| Eggplant cultivar 2 | 18 | 2 | 90 |
Table 2: Operation abortion rate.
Compared to existing fruits harvesting robots, this robot was able to abort operation once the weight of the fruits inside the collection container had attained their failure point. A design that is lacking in almost if not all the fruits harvesting robots developed so far. The relatively high success rates recorded from the prototype results signified significant improvement in the development of autonomous multipurpose harvesters, using advanced technologies and robust data to produce a commercially viable automated fruits harvester.
Conclusion
This study was carried out to design and develop a prototype of fruits harvesting robot. It is a multi-purpose fruits harvester designed from various cultivars of pepper and eggplant fruits. The robot combined the mechanical and optical properties of the targeted fruit during harvesting and handling operations. The fruits collection (storage) container was fitted with a sensor, and if the maximum permissible weight had been attained, the harvesting operation will be aborted. This was done to minimize the rate of damage been done to the harvested fruit. Laboratory trial revealed high successes of fruit harvesting rate and operation abortion rate; which showed that the automated system is not only efficient but cost effective. Commercial production of this automated fruits harvesting system will help to save production cost, as it can harvest more than one type crop; unlike its predecessors that were only tailored to be crop specific harvester.
Future Scope
- Solar or other forms of green energy should be used to replace the Lipo batteries, to make the system more sustainable.
- Incorporation of web services into the robotic system, so that the harvesting operation can be controlled using an android smartphone.
References
-
FAO (2018) The State of Food Security and Nutrition in the World: Building Resilience for Peace and Food Security. Rome.
-
Fountas S, Blackmore B, Vougioukas S, Tang L, Sørensen C, et al. (2019) Decomposition of agricultural tasks into robotic behaviours.
-
Nwanze NE, Uguru H (2020) Optimizing the efficiency of eggplant fruits harvesting and handling machines. Journal of Materials Science Research and Reviews 6(3): 1-10.
-
Shamshiri RR, Weltzien C, Hameed IA, Yule IJ, Grift TE, et al. (2018) Research and development in agricultural robotics: A perspective of digital farming. Int J Agric & Biol Eng 11(4): 1-14.
-
Lehnert C, English A, McCool C, Tow AW, Perez T (2017) Autonomous sweet pepper harvesting for protected cropping systems. IEEE Robot Autom Lett 2(2): 1-8.
-
Idama O, Uguru H (2021) Robotization of Tomato Fruits Production to Enhance Food Security. Journal of Engineering Research and Reports 20(1): 67-75.
-
Idama O, Uguru H, Akpokodeje OI (2021) Mechanical properties of bell pepper fruits, as related to the development of its harvesting robot. Turkish Journal of Agricultural Engineering Research 2(1): 101-122.
-
De Baerdemaeker J, Munack A, Ramon H, Speckmann H (2001) Mechatronic systems, communication, and control in precision agriculture. IEEE Control Syst 21(5): 48-70.
-
FAO (2019) Digital technologies in agriculture and rural areas. Rome.
-
Blackmore BS, Fountas S, Gemtos TA, Griepentrog HW (2009) A specification for an autonomous crop production mechanization system. In Proceedings of the International Symposium on Application of Precision Agriculture for Fruits and Vegetables, Orlando, FL, USA, 824: 201-216.
-
Pedersen SM, Fountas S, Sørensen CG, Van Evert FK, Blackmore BS (2017) Robotic seeding: Economic perspectives. In Precision Agriculture: Technology and Economic Perspectives; Pedersen, S.M., Lind, K.M., Eds.; Springer International Publishing: Cham, Switzerland. 167-179.
-
Ishak W, Ismail W (2010) Research and Development of Oil Palm Harvester Robot at Universiti Putra Malaysia. Int J Eng Technol 7(2): 87-94.
-
Tang X, Zhang T, Liu L, Xiao D, Chen Y (2009) A new robot system for harvesting cucumber. Proceedings in American Society of Agricultural and Biological Engineers Annual International Meeting 3873-3885.
-
Bac CW, Hemming J, Van Henten EJ (2013) Robust pixel- based classification of obstacles for robotic harvesting of sweet-pepper. Comput Electron Agri 96: 148-162.
-
Hua Y, Zhang N, Yuan X, Quan L, Yang J, et al. (2019) Recent advances in intelligent automated fruit harvesting robots. The Open Agriculture Journal 13: 101-106.
-
Mueller-Sim T, Jenkins M, Abel J, Kantor G (2017) The Robotanist: A ground-based agricultural robot for high- throughput crop phenotyping. In Proceedings of the IEEE International Conference on Robotics and Automation, Singapore. 3634-3639.
-
Feng Q, Zheng W, Qiu Q, Jiang K, Guo R (2012) Study on strawberry robotic harvesting system. In Proceedings of the CSAE 2012 IEEE International Conference on Computer Science and Automation Engineering, Zhangjiajie, China 27(1): 320-324.
-
Siciliano B, Khatib O (2016) Springer Handbook of Robotics. Springer: Berlin, Germany.
-
Nasir A, Rahman M, Mamat A (2012) A study of image processing in agriculture application under high performance computing environment. Int J Comput Sci Telecommun 3(8): 16-24.
-
Barth RI, Jsselmuiden J, Hemming J, Van Henten EJ (2018) Data synthesis methods for semantic segmentation in agriculture: A Capsicum annuum dataset. Comput Electron Agric 144: 284-296.
-
Yasukawa S, Li BH, Sonoda T, Ishii K (2017) Development of a tomato harvesting robot. The 2017 international conference on artificial life and robotics (ICAROB 2017), seagaia convention center, miyazaki, Japan, 408-411.
-
Davidson JR, Hohimer CJ, Mo CK, Karkee M (2017) Dual robot coordination for apple harvesting. ASABE Annual International Meeting. Spokane, Washington 1-9.
-
Akpokodje OI, Uguru H (2019) Calcium treatment and harvesting stage influence on textural quality of eggplant (cv. Africa black beauty) fruits. Journal of Engineering and Information Technology 6(3): 18-23.
-
Ijabo J, Irtwange SV, Uguru H (2019) Effects of storage on physical and viscoelastic properties of yam tubers. Direct Research Journal of Agriculture and Food Science 7(7): 181-191.
-
Alibas I, Koksal N (2015) Determination of physical, mechanical, and structural seed properties of pepper cultivars. Int. Agrophys 29(1): 107-113.
-
Ashtiani SHM, Golzarian MR, Motie JB, Emadi B, Jamal NN, et al. (2016) Effect of loading position and storage duration on the textural properties of eggplant. International Journal of Food Properties 19(4): 814-825.
-
Rokayya S, Khojah E (2016) Physical-mechanical Estimation of Pepper (Capsicum annuum L.) Fruit Varieties. Journal of Northeast Agricultural University 23(3): 61-69.
-
Umurhurhu B, Uguru H (2019) Effect of storage duration on mechanical properties of Bello eggplant fruit under quasi compression loading. International Journal of Research Granthaalayah, 7(5): 311-320.
-
Moran ME (2007) Evolution of robotic arms. Journal of robotic surgery 1(2): 103-111.
-
Russel R, Beaver PA, Lehnert C (2019) A robotic harvester. US20190029178A1.
-
Rodriguez EG, Kannan SA, Renjith G, Karishma Raju, Anju PN, et al. (2017) Agricultural automation system with field assisting robot-AgroBot. International Journal of Innovative Research in Science, Engineering and Technology 118(20): 345-351.
-
Goel A (2018) Servo Motor : types and working principle explained.
-
Raspberry (2020) Raspberry Pi 3 Model B+.
-
Platform (2020) Motor Shield V2.0.
-
Raspberry (2021) Camera Module V2.
- Enhancement of Vegetative Growth and Fruit Yield in Cucumber (Cucumis sativus L.) via Spiritual Blessing (Biofield) Energy Intervention
- Production of Açaí (Euterpe oleracea Mart.) under Different Agroforestry System Management Intensities in Amazonian Floodplain (Varzea) Forests
- Coffee and the Production Region: What is the Secret to the Expression "Quality"?
- Experiential Agripreneurship Training in Sub-Saharan Africa: Integrating a Business Incubator into Postgraduate Livestock Education at the University of Buea
- Advances in Agricultural High-Quality Development
- Linking Compost Residue to ABAGE in Plants - a Short Note