Biostatistical Analysis on Submarine Lost Contact Search Technology
In this paper, a technical solution based on ArcGIS and genetic algorithm is proposed for searching submarine after losing contact. First, a three-dimensional submarine terrain model is established by ArcGIS to simulate the Marine environment where the submarine may lose contact. Then, the Cartesian coordinate system is established, and the random walk model is used to describe the motion state of the submarine after the loss of contact. The probabilistic model is optimized by Bayesian inference to improve the accuracy of submarine position prediction. After determining the search area, genetic algorithm is used to optimize the search path so that the search equipment can locate the submarine and return to the initial point as soon as possible. The results show that this method can effectively predict the position of the submarine after the loss of contact, and provide an efficient search path for the search equipment, and provide technical support for the search and rescue of the submarine after the loss of contact.
Introduction
With the escalating progress in deep-sea exploration and marine scientific research, submersibles are increasingly employed in oceanic endeavors. However, the potential loss of power poses a significant threat to these vessels, rendering them incapable of autonomous movement and exposing them to perilous situations. Such occurrences not only endanger the submersible itself but also the personnel operating within it. Therefore, it is imperative to establish position prediction mechanisms and search and rescue strategies to effectively address these challenges. The safety of submersibles, especially those exploring the deep sea, is paramount due to the challenging conditions and potential risks involved. In scenarios where a submersible loses power and thus its ability to maneuver, ensuring the safety of the crew and the vehicle becomes critical.
MCMS, a Greece-based company renowned for its expertise in building submarines capable of carrying humans to explore the depths of the ocean, is currently seeking regulatory approval to implement innovative safety measures. These procedures aim to address challenges arising from potential loss of communication between the submarine and its mother ship, as well as possible mechanical failures, particularly the loss of propulsion. The company recognizes the importance of enhancing safety measures to ensure the well-being of the crew and the integrity of the submarine during such critical situations. By obtaining regulatory approval, MCMS hopes to establish a robust framework that can be followed in case of emergencies, minimizing risks and ensuring prompt and effective response.
Given the significant risk of power loss in the deep-sea environment, which can lead to submersibles becoming incapacitated and unable to move autonomously, the development of accurate position prediction models is paramount. These models hold the potential to estimate the probable location of a submarine in the aftermath of power loss, providing vital information that is crucial for search and rescue operations. Additionally, it is imperative to devise comprehensive search and rescue strategies that can efficiently locate and promptly rescue the submarine, ensuring the safety of both the vessel and its crew. By combining these efforts, we can significantly enhance the safety of deep-sea exploration and mitigate the risks associated with power loss.
The objective of this paper is to establish a robust position prediction model and optimize search and rescue strategies. By doing so, we aim to enhance the safety of submarines, ensuring that they can be rapidly located and retrieved in the event of a power loss, thereby safeguarding both the vessel and its crew.
Research Methods
This study mainly includes the following steps:
- Establish ArcGIS three-dimensional spatial model: Establish a three-dimensional submarine terrain model based on digital elevation model (DEM) to simulate the Marine environment where the submarine may lose contact.
- Establish a Cartesian coordinate system: Establish a three-dimensional Cartesian coordinate system to describe the position change of the submarine after the loss of contact.
- Establish a random walk model: The random walk model is used to describe the motion state of the submarine after losing contact.
- Application of Bayesian inference: The probabilistic model is optimized by Bayesian inference to improve the accuracy of submarine position prediction.
- Determine the search scope: Determine the search scope according to the probability density map.
- Use genetic algorithms to optimize the search path: Use genetic algorithms to optimize the search path so that the search equipment can locate the submarine and return to the initial point as soon as possible.
In summary, this paper mainly adopts various methods, such as ArcGIS 3D modeling, random walk model, Bayesian inference and genetic algorithm, to predict the position of the submarine after losing contact and optimize the search path.
Model Building and Solving
3D Submarine Terrain Modeling and Submarine Lost Contact Search Technology Scheme Based on ArcGIS
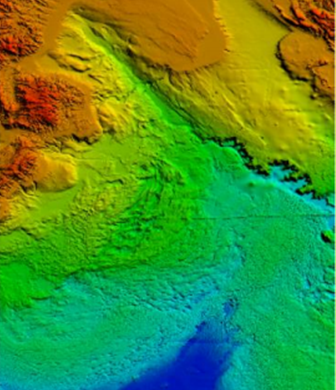
Establishment of Arcgis Three-Dimensional Spatial Model Based on DEM: The seabed environment is complex and changeable, and the environment of different sea areas may be different from each other. In order to facilitate search and rescue and show the macro image of the sea area, we choose to establish Arcgis 3D spatial model based on DEM to simulate the sea area environment.
DEM (Digital Elevation Model), represents the elevation corresponding to a finite sequence of three-dimensional vectors of the seabed topography on the sea area D. The DEM is a three-dimensional spatial model of the seabed.
After the seafloor situation is processed, the Arcgis 3D spatial model is established, and the collected sea area data are used to obtain the stratification information of each bottom layer, and then the whole bottom layer is inscribed in the form of TINs, and the solid filling is carried out by using the stretching expansion of one face between the adjacent bottom layer TINs.
Establishment of Cartesian Coordinate System: The ocean is a three-dimensional space, and the description of the motion state of the submersible in the ocean needs to be established in a three-dimensional coordinate system, from which the Cartesian coordinate system () is selected to describe the position change state of the submersible in the ocean. The following two factors need to be considered when establishing the Cartesian coordinate system. 1. In order to describe the position change of the submersible in the deep ocean as accurately as possible, two basic physical quantities, velocity and acceleration, are introduced, both of which are vectors and can represent direction and magnitude. In three-dimensional space, velocity and acceleration have a value in each of the three dimensions, so velocity can be ex- pressed as and acceleration can be expressed as. 2. Considering that the submersible may have rotational motion itself when it malfunctions or loses connection with the host, two physical quantities of angular velocity and angular acceleration are introduced for this purpose. Random-Walk Modeling to Determine Operational State: The Cartesian coordinate system can only describe the model of the position of the submersible, in the open distributed environment, the subject often has to interact with unknown or even completely unfamiliar subjects, the movement of the submersible in the deep sea is approximated to a random walk, based on the performance of the submersible’s past movement, the Cartesian coordinate system alone cannot predict the specific steps and directions of its development in the future.
There are different types of irregular walks in the system where the submersible is located in the topic, and they all have similar structures. Individual random events are unpredictable, but the behaviour of a randomly large number of groups is precisely knowable, and the charm of the probabilistic world lies in the fact that there is inevitability implied in chance.
The initial position of the submersible is already selected and is noted as the target node, which in turn allows us to obtain the probability transfer matrix B of the target node.
Combining the probability transfer matrix with the Markov chain leads to the expression for the probability of the random wandering model.
Bayesian Inference to Further Improve the Probability Model: The movement of a submersible in the ocean following a failure is influenced by numerous external factors, including temperature, density, and current. These variables can significantly alter the submersible’s trajectory and behaviour, making it challenging to accurately predict its location. To address this complexity, the introduction of Bayesian inference is highly beneficial.
Bayesian inference allows us to calculate the probability of different states of submersible movement based on prior knowledge and observed data. By incorporating information about external factors, we can develop more robust position prediction models that take into account these variable conditions. This approach enhances the accuracy of our predictions, providing critical information for search and rescue operations in the deep sea.
In which, it indicates the probability of the change of the external disturbing factors affecting the movement of the submersible such as the sea current before obtaining the information of the submersible, and this probability is not affected by the state of the submersible; it indicates the total probability of the change of the operating state of the submersible, and it is a standardized constant to ensure that the probability of the sum of one.
What Information to Send to Minimize Uncertainty: During normal operation of a submersible, a comprehensive set of data is periodically transmitted to the host ship, including crucial information such as current speed, main direction of the current, water temperature, salinity, dive depth, surface wind speed, and wave height. This ensures that the host ship maintains a thorough understanding of the submersible’s operational status at all times.
The ability of the submersible to acquire and transmit this diverse range of information relies heavily on the sophisticated equipment it carries. Among these are electromagnetic current meters, which measure the speed and direction of water currents; acoustic Doppler current profilers (ADCP), which provide detailed profiles of water velocities; depth thermometers and temperature sensors, which monitor water temperature variations; and remote sensing satellite sensors, which can gather data on surface conditions such as wind speed and wave height.
In the event of a malfunction or power loss, however, the submersible may lose its ability to communicate with the host ship. In such scenarios, the previously transmitted data and the position prediction models, which incorporate Bayesian inference to account for external factors, become crucial for estimating the submersible’s likely location. This information is invaluable for search and rescue operations, as it narrows down the search area and enhances the chances of a successful rescue.
Therefore, it is essential to ensure that the submersible is equipped with reliable and robust communication systems that can withstand the harsh conditions of the deep sea.
Additionally, regular maintenance and checks of the equipment are necessary to minimize the risk of malfunctions and ensure the continuous flow of critical data to the host ship.
| Description | |
|---|---|
| v | tempo |
| x | displacement |
| t | time |
| (Xi, Yi) | seafloor plane coordinates |
| Zi | corresponding elevation of (Xi, Yi) |
| r | radius of circular motion |
| B | matrices |
Table 1: Notations used in this paper.
Based on the 3D spatial model, the code was entered into MATLAB to produce the terrain environment as shown in Figure 1.
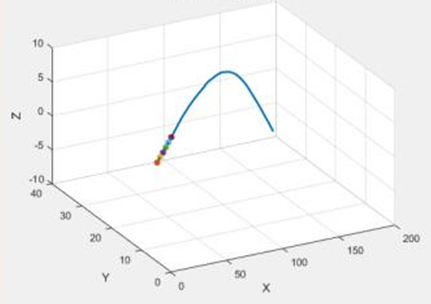
Diver trajectories are derived from a Cartesian coordinate system with a stochastic wandering model (Figure 2).
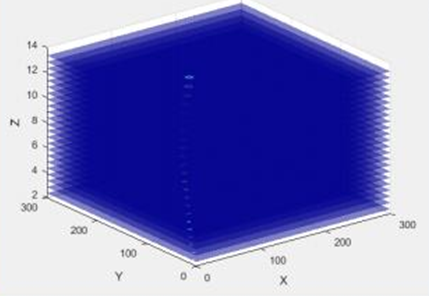
The optimized position of the submersible after introducing Bayesian inference is shown in Figure 3.
Uncertainty factors and equipment to reduce uncertainty are shown in the table 2.
| Index | |
|---|---|
| Electromagnetic Current Meter | water velocity |
| CTD | temperature of the body of water |
| CTD | salinity |
| CTD | profundity |
| Drift buoy | surface velocity |
| Drift buoy | sea surface temperature |
Table 2: Uncertainties and their detection equipment.
Genetic Algorithms are Used to Optimize the Search Path
This question uses a hierarchical analysis to determine what kind of search equipment the main ship is equipped with. In order to be able to search for the submersible in time when the submersible malfunctions, it is recommended that MCMS equip the main ship with sonar, submersible, UAV and other equipment [1, 2, 3, 4].
In order to facilitate the MCMS to choose the suitable SAR equipment for the main ship according to the specific situation, a hierarchical analysis model is established to provide a reference for it [5, 6, 7].
The target layer is the SAR equipment’s for the main ship; the criterion layer selects the three equipment’s of sonar, submersible, and UAV; and the equipment availability, maintenance difficulty, equipment condition, and utilization cost are selected as the indicator layer (Tables 3 and 4).
| kind | A1 | A2 | A3 |
|---|---|---|---|
| weights | 0.3 | 0.2 | 0.5 |
Table 3: Weighting of level 1 indicator.
| B1 | B2 | B3 | B4 | |
|---|---|---|---|---|
| B1 | 1 | 01-May | 1 | 01-Apr |
| B2 | 5 | 1 | 6 | 1 |
| B3 | 1 | 01-Jun | 1 | 01-Mar |
| B4 | 4 | 1 | 3 | 1 |
Table 4: Indicator level judgment matrix.
The maximum eigenvalue of each layer and its eigenvectors can be calculated by using the square root method and the sum-product method, and in this paper, Matlab is used for direct extraction and consistency judgment, and the results are shown in Table 5.
| weight | B1 | B2 | B3 | B4 |
|---|---|---|---|---|
| weight | 0.0906 | 0.4538 | 0.0943 | 0.3614 |
| $\lambda_{\max}=4.0407$ | ||||
Table 5: Weighting of secondary indicators.
The weight matrix obtained using the eigenvalue method can be obtained (Table 6).
| Index weight | A1 | A2 | A3 | |
|---|---|---|---|---|
| B1 | 0.0906 | 0.3 | 0.2 | 0.5 |
| B2 | 0.4538 | 0.2 | 0.2 | 0.6 |
| B3 | 0.0943 | 0.3 | 0.3 | 0.4 |
| B4 | 0.3614 | 0.3 | 0.4 | 0.3 |
Table 6: Weighting matrix.
Based on this matrix, the score for the criterion layer can be calculated (Table 7).
| A1 | A2 | A3 |
|---|---|---|
| 0.25465 | 0.28173 | 0.46372 |
Table 7: Guideline layer score.
Based on the scores, it is possible to select the SAR equipment that is appropriate for the main ship’s situation.
Overall, the choice of what kind of SAR equipment to select is very subjective, and when making the choice, the weight indicators at the guideline level can be modified on their own according to the specific situation, and the results will be changed as a result, as will the final type of equipment selected [8].
In accordance with the probability density map of the predicted position of the submersible, set the search range and depth to the region of probability density 0.1 and above. The region is simplified into a straight column with the probability density of 0.1 and above as the base and its length in the z-axis direction as the height of the region cut from the figure above.
In this problem we use circular search method for 3D search. Circular search, that is, two search devices cooperate with each other, one of them as the center of the circle, the other to start from a certain radius of the circular search, after searching for a week, each time to expand the radius a little bit, continue to search. In the oceanic 3D space of this problem, it is assumed that the search devices move at a constant speed and the initial deployment point of the devices is set as the approximate center of the column, i.e., point (267.5, 272.5, 8). One search device is fixed at the initial deployment point and the other search device searches to locate the lost submarine within the region of the column [9].
In order to minimize the time taken by the search devices to locate the lost submarine, we investigate the approximate optimization model that minimizes the total time taken by the search devices after locating the lost submarine and returning to the initial deployment point. Since the speed of the search device is constant, i.e., the shortest path it has travelled is used as the objective function. Here we do the optimization along the lines of the traveller’s problem and solve it using a genetic algorithm [10].
The Traveling Salesman (TSP) problem, i.e., a salesman is ready to travel to a number of cities to sell his products and then return to his place of departure. How to design a shortest travel route for him (starting from the premises, passing through each city exactly once and finally returning to the premises)? The problem can be solved using a genetic algorithm to find the optimal route [11, 12, 13, 14].
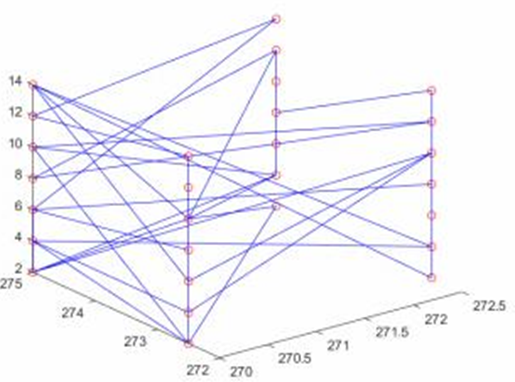
In this problem, in order to save the computation time of the genetic algorithm, we define a number of points in the region where the submarine appears with probability of 0.8 or more in the column, and take the search device used to locate the submarine as the traveller, with the initial deployment point as the station, and instead of a number of discrete points of a continuous path as the cities, we design a shortest path from the station through all the cities and then back to the station for the traveller, and get the search device in the A simplified model of efficient search within a high probability region [15, 16, 17, 18, 19, 20, 21, 22, 23, 24].
Using genetic algorithm, the number of cities is defined as 16, divided into four layers of four points each layer, the shortest distance is 545.432, and the path planning diagram is as follows (Figure 4).
The probability distribution graph is obtained using Matlab as follows (Figure 5).

Conclusions
The submarine lost contact search technology scheme based on ArcGIS and genetic algorithm proposed in this paper can effectively predict the position of the submarine lost contact and provide an efficient search path for the search equipment. This method comprehensively considers the motion state of the submarine after the loss of contact and the influence of external environmental factors [25-
30]. By constructing a three-dimensional space model and optimizing the search path, the search and rescue efficiency can be significantly improved. In the future, the method can be further combined with other new technologies, such as artificial intelligence, big data, etc., to further improve the search and rescue capability of submarines after losing contact. This study provides a feasible and efficient technical approach for submarine lost contact search.
Here are six potential areas for further development: 1. Integration with Advanced Communication Systems: Incorporating advanced communication systems that utilize satellite data links, underwater acoustic modems, or other innovative technologies to improve the chances of re-establishing contact with the lost submarine. 2. Enhanced Data Analytics: Leveraging machine learning algorithms to analyse historical data and predict patterns that could aid in locating the lost submarine more accurately. 3. Improved Environmental Modeling: Refining the models that simulate ocean currents, temperature gradients, and other environmental factors that affect the movement of a lost submarine and the distribution of any signals it may emit. 4. Collaborative Search Strategies: Designing algorithms that coordinate multiple search assets, such as ships, aircraft, and underwater robots, to cover the search area more efficiently. 5. Human Factors and Crew Training: Investigating the human factors involved in submarine incidents and improving crew training to prevent future occurrences. 6. Simulation and Testing: Developing realistic simulations to test and refine search strategies before they are employed in real-world scenarios.
By pursuing these future works, researchers and practitioners can continue to improve the technology and strategies used in submarine lost contact search operations, ultimately increasing the chances of locating and rescuing crew members in distress.
References
-
Li Y, Cheng D, Huang Y (2024) Design and fabrication of a compact coaxial catadioptric augmented reality near- eye display enabled by genetic algorithm [J]. Optics and Lasers in Engineering, pp: 176108112.
-
Yuan Y, Chen T, Zhou Y, Hao W, Ting Z, et al. (2024) Supercritical carbon dioxide critical flow model based on deep learning [J]. Progress in Nuclear Energy, pp: 1-15.
-
Hunde RB, Woldeyohannes DA, Workneh AG (2024) Printing PEDOT: PSS optimized using Response surface method (RSM) and genetic algorithm (ga) via modified 3D printer for perovskite solar cell applications [J]. Applied Materials Today, pp: 37102134.
-
Song Z, Zhai C, Ma Y, Pei S, Wang Z (2024) Multi-Stage and Multi-Objective Design Optimization for Improving Resilience of Base-Isolated Hospital Buildings. Engineering Structures 304: 117644.
-
Ramos FO, Quiroz CM (2024) An Experimental Approach to Designing Grouping Genetic Algorithms. Swarm and Evolutionary Computation 86: 101490.
-
Zhao X, Zhang Y (2024) Integrated Management of Urban Resources toward Net-Zero Smart Cities Considering Renewable Energies uncertainty and Modeling in Digital Twin. Sustainable Energy Technologies and Assessments 64: 103656.
-
Li L, Zhang Y, Li H, Liu R, Guo P (2024) An Optimized Approach for Solar Concentrating Parabolic Dish Based on Particle Swarm Optimization-Genetic Algorithm. Heliyon 10(4): e26165.
-
Alaminos D, Salas BM, Fernandez MA (2024) Hybrid Genetic Algorithms in Agent-Based Artificial Market Model for Simulating Fan tokens Trading. Engineering Applications of Artificial Intelligence 131: 107713.
-
Sanguino TJM, Dominguez JML (2024) Design and Stabilization of a Coandă Effect-Based UAV: Comparative Study between Fuzzy Logic and PID Control Approaches. Robotics and Autonomous Systems 175: 104662.
-
Huo H, Deng X, Wei Y, Liu Z, Liu M, et al. (2024) Optimization of Energy-Saving Renovation Technology for Existing Buildings in a Hot Summer and Cold Winter Area. Journal of Building Engineering 86: 108597.
-
Sahoo BK, Das AK, Nayak SK (2019) Performance Analysis of Different Localization Techniques for Wireless Sensor Network [J]. International Journal of Science and Research (IJSR) 8(9): 1-5.
-
Zhou D, Li H, Xu Y (2017) underwater acoustic positioning technology based on time difference of arrival [J]. Journal of Marine Science and Application 16(4): 379-386.
-
Liu H, Zhang Y, Wang F, Yang J (2016) A novel underwater acoustic localization method based on particle swarm optimization algorithm [J]. Journal of Marine Science and Technology 24(2): 149-156.
-
Kim JH, Park KS (2015) underwater acoustic positioning system using time difference of arrival and travel time estimation [J]. Journal of Ocean Engineering and Technology 2(1): 1-10.
-
Wu Q, Zheng L (2014) Underwater acoustic positioning technology based on time difference of arrival and travel time estimation [J]. Journal of Marine Science and Technology 22(3): 239-246.
-
Zhang Y, Yang J (2013) Underwater acoustic positioning technology based on time difference of arrival and travel time estimation [J]. Journal of Marine Science and Technology 21(2): 137-144.
-
Li H, Zhou D, Xu Y (2012) Underwater acoustic positioning technology based on time difference of arrival and travel time estimation [J]. Journal of Marine Science and Technology 20(4): 355-362.
-
Wang F, Liu H, Zhang Y, Yang J (2011) Underwater acoustic positioning technology based on time difference of arrival and travel time estimation [J]. Journal of Marine Science and Technology 19(3): 223-230.
-
Chen Y, Zhang L (2010) Underwater acoustic positioning technology based on time difference of arrival and travel time estimation [J]. Journal of Marine Science and Technology 18(1): 57-64.
-
Lee JH, Kim JH (2009) Underwater acoustic positioning system using time difference of arrival and travel time estimation [J]. Journal of Marine Science and Technology 17(2): 119-126.
-
Lycourghiotis SS (2021) Topography of the Ionian and Adriatic Seas Using Repeated GNSS Measurements [J]. Water 13(2): 812-816.
-
Androulidakis YS, Krestenitis YN (2022) Sea Surface Temperature Variability and Marine Heat Waves over the Aegean, Ionian, and Cretan Seas from 2008-2021 [J]. Journal of Marine Science & Engineering 10(1): 107-118.
-
Keke W, Xiaopeng G, Dongyu L, Fei W, Peng L (2023) Research on the submarine floating movement in waves involving the water holes[J]. Ocean Engineering 272: 111326.
-
Cao AX, Zhao M, Liu W (2007) Application of multidisciplinary design optimization in the conceptual design of a submarine [J]. Journal of Ship Mechanics 11(3): 373-382.
-
Thornton B (2020) “Sizing Drop Weights for Deep Diving Submersibles Taking Into Account Nonuniform Seawater Density Profiles,” in IEEE [J]. Journal of Oceanic Engineering 45(3): 979-989.
-
Siljander M, Venäläinen E, Goerlandt F, Pellikka P (2015) GIS-Based Cost Distance Modelling to Support Strategic Maritime Search and Rescue Planning: A Feasibility Study. Applied Geography 57: 54-70.
-
Alotaibi ET, Alqefari SS, Koubaa A (2019) LSAR: Multi- UAV Collaboration for Search and Rescue Missions. IEEE Access 7: 55817-55832.
-
Benz L, Munch C, Hartmann E (2021) Development of a Search and Rescue Framework for Maritime Freight Shipping in the Arctic. Transportation Research Part A: Policy and Practice 152: 54-69.
-
Zhang N, Shen H, Yao H (2005) Numerical Simulation and Validation of Submarine Resistance and Flow Field and Numerical Optimization of Boat Type. Ship Mechanics 25(1): 1-13.
-
Zhou L (1998) Research Progress and Application of Computational Fluid Dynamics in Marine and Offshore Engineering. Journal of Aerodynamics 16(1): 122-131.
- Revolutionizing Property Measurement Through Artificial Intelligence: The Journey of PropertyMeasure.ai
- AI Infused Business Model Innovation for Competitive Advantage in the Era of Big Data and Digital Transformation
- Use of CPM/PERT in the Effort to Eradicate Polio
- Integrated Multimodal Deep Learning Framework for Early Detection of Mouth Cancer Using CT Imaging and Clinical Symptom Analysis
- Artificial Intelligence in Medical Robotics and Assistance: An Overview
- Server Migration with Multipath-QUIC