Coordinated Interference of Multiple UAVs on Networked Radar
Aiming at the characteristics of strong anti-jamming ability of networked radar, this paper studies the trajectory optimization problem of multi-UAV cooperative deception jamming of networked radar, and proposes a trajectory optimization model of multi-UAV cooperative deception jamming of networked radar. Considering the factors such as speed, altitude, heading Angle, turning radius, etc., the 3D motion and flight path optimization model of UAV are established. The hierarchical decomposition method is used to simplify the problem, and the collaborative interference path is planned by search and particle swarm optimization. The principle of false target deception jamming is analyzed, the geometric model and motion equation of a single UAV are established, the constraints of cooperative deception and the cost function are determined, and the UAV track is obtained. The layered planning is used to optimize the UAV cooperative motion, increase the actual conditions, improve the fitness function of particle swarm optimization algorithm, and adapt to different radar systems.
Bin Zhao* and Wenfei Zou
Introduction
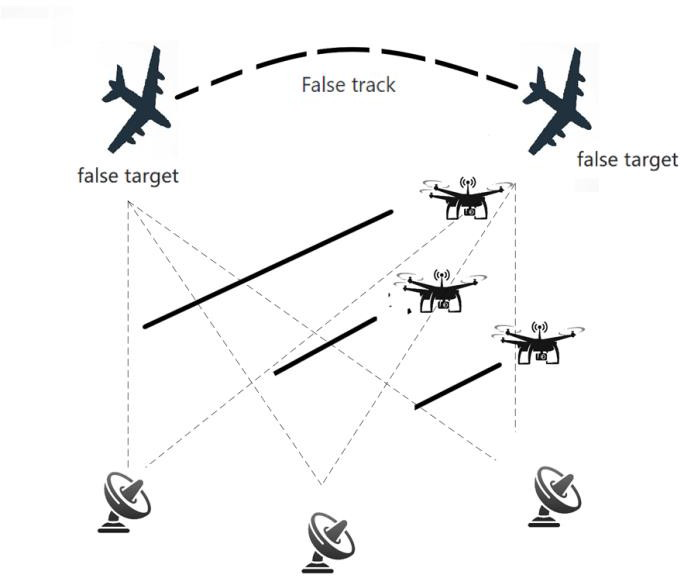
Networked radar is the most important threat source in modern military. It mainly searches, tracks and identifies targets through radars that separate spatial positions and cover overlapping positions [1]. Active range multiple false target spoofing is a kind of jamming method that is developing and getting more and more attention [2]. Its jamming energy enters the main lobe of radar, so it requires less prior knowledge of radar and has better jamming effect on single radar. However, due to the different spatial positions of active false targets observed by different radars in the network, networked radar systems can effectively identify false targets [3]. In order to deal with this challenge, the advantages of multi-UAV distributed jamming and space trajectory fusion can be used to conduct collaborative jamming and form deceptive jamming trajectory, so as to achieve the purpose of deception and force the enemy to strengthen air defence.
Multiple aircraft can cooperatively generate false radar track targets, which can effectively interfere with networked radar [4, 5, 6]. Chencong D, et al. [7] proposes a multi-UAV collaborative deception jamming technology that improves the whale algorithm, and introduces adaptive inertial weights to improve the global search capability and convergence speed of the algorithm. Changwen L, et al. [8] proposes the EWA collaborative jamming network radar control strategy to achieve the optimal control of the spoofing of the network radar. The range deception of the networked radar is carried out by multiple warplanes (one UAV can only deceive one radar at the same time), but the terminal of the radar receiver of this part (radar update frequency is 10 seconds) can generate multiple target points. Through the cooperative flight of multiple UAVs, multiple radars (at least 3) will detect the target signal in the same spatial position of the unified coordinate system in the fusion center. In other words, if it is judged as a reasonable target track point, multiple successive reasonable target track points will form a target track [9], and a false track will be realized.
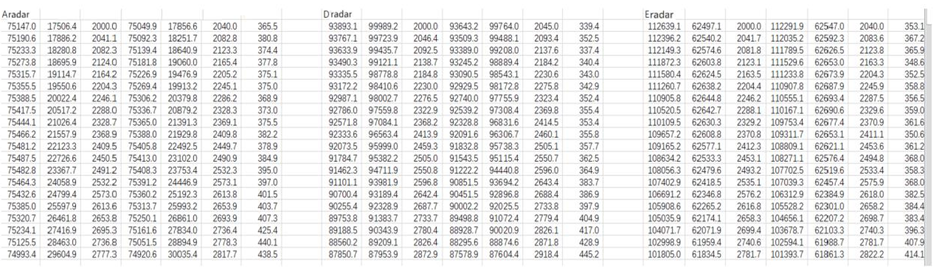
Assume that a network radar system consists of 5 radars, the geographical position coordinates of the 5 radars are known, and the effective detection range of the radar is within 150 km. The existing false target track data contains 20 moments of false target position coordinate information with a time interval of 10 seconds. However, they all obtain a batch of targets’ spatial status data every 10 seconds, and the false target information forwarded by the UAV to the corresponding radar can be obtained in time. This paper mainly studies the following aspects:
First, under the condition of uniform linear motion of UAVs, the number of UAVs in achieving the specified false target track is optimized. According to the concept of homology test, and a drone can only interfere with one radar at the same time, at least 3 drones need to interfere with three radars at the same time. Secondly, because the speed of the drone is uniform, the distance that each drone moves within the same time interval is also certain. By adjusting the flight height, direction and speed of the UAV, it can meet the false target track of a certain section. The coordinate calculation and the actual track path of the UAVs that can be satisfied by each track point under each individual radar is carried out, and the search algorithm is applied to eliminate the duplicate and useless tracks combined with all the tracks under five radars [10], so as to obtain the minimum number of UAVs motion optimization model.
Secondly, when the assumed false track is satisfied, the UAV is allowed to forward a maximum of 7 false targets at the same time, the turning radius of the UAV is limited to no less than 250m and the movement time is limited to 5 minutes, and 9 drones are used to generate as many false tracks as possible. Three drones were pulled out of the nine to complete the designated false course, and the remaining six to generate as many false trails as possible. Therefore, for the remaining 6 UAVs, particle swarm optimization algorithm is used to set constraints and objective functions, so that the radar can detect more identical track points as much as possible and obtain more false routes, so as to optimize the UAVs collaborative task assignment model [11].
Finally, the situation of radar in the networked radar system being interfered is analyzed. Based on the fact that the other two radars that jointly detected the target with the interfered radar before are not interfered, and after the fusion center conducts homology test on the targets detected by the two radars, the optimization of the UAV collaborative assignment task is considered again through the provision that the target track point is considered to be reasonable.
Trajectory Optimization Model of Multi- UAV Cooperative Deception Jamming for Networked Radar
The Motion Rule and Cooperative Strategy of UAV with false Target Trace are Defined
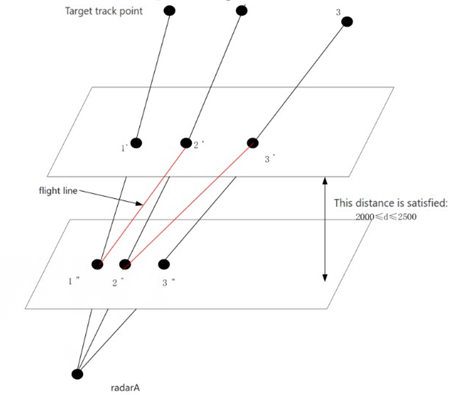
Collaborative Deception Model: In the process of jamming, multiple jammers need to cooperate together to achieve the purpose of fusing multiple false targets into the same target in space. Therefore, taking the distance coefficient as the variable to optimize the jammer motion model can make the optimization model more reasonable. In the course of flight, due to the influence of power or other factors, the arrival position of the jammer at a certain time deviates from the ideal position, resulting in the deviation between the distance false target and the ideal situation. As shown in Figure 1, the figure shows the position of radar, the position of jammer in ideal state, the position of false target, and the position of false target under error condition.
It is thus known that the following two conditions are usually met for the UAV to produce deception interference: 1. The number and specific positions of radars in the radar network are fixed. 2. The drone must be on the connection line between the radar and the false target, that is, the radar, the drone and the false target must be in line.
Firstly, the delayed interference track formed by a single jammer to single radar is analyzed, and in order to facilitate understanding and calculation, it is expounded on a two- dimensional plane, as shown in Figure 2.
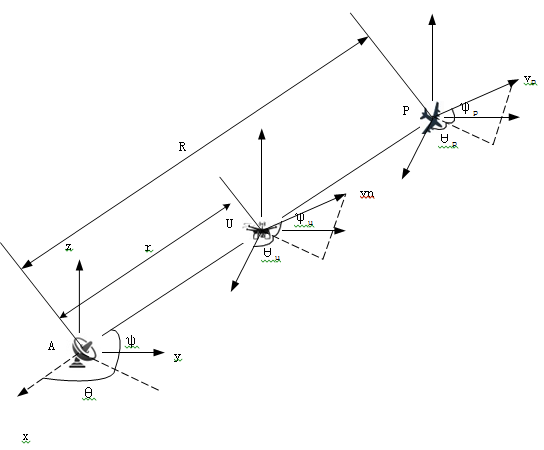
In Figure 2, A,U,P represents the radar, jammer and false target respectively. The speed, azimuth and pitch Angle of the false target track are defined as ( ), ( ) p p v t t θ and ( ) p t θ respectively. The position coordinate of the radar is (xr , yr , zr) , the starting position coordinate of the aircraft is (xu(0), yu(0), zu(0)) , and the speed, azimuth and pitch Angle are respectively ( ), ( ) u u v t t θ and ( ) u t θ . The relation of the false target in the rectangular coordinate system is obtained from the space geometry relation:
p p p p x v cos cos θ ϕ = (1)
sin p p p p y v cos θ ϕ = (2)
sin p p p z v ϕ = (3)
1 p p v u = (4)
2 p p u α = (5)
3 p p u β = (6)
where u_p1_, u_p2_ and u_p3_ are the velocity of the false track, the azimuth velocity and the pitch velocity respectively. The space transformation relationship between cartesian coordinates and polar coordinates is = − − x R RCOS y R z cos cos cos cos sin sin cos cos 0 sin cos cos cos cos ϕ θ ϕ θ ϕ θϕ θ ϕ θ ϕ θ ϕ θ ϕ p (7) p p Then, it can be obtained by equations (1), (2), (3) and (7) (cos cos cos cos cos sin cos sin sin cos ) p p p p p p R v ϕ θ ϕ θ ϕ θ ϕ ϕ ϕ ϕ = + + (8) p p p p p v θ θ ϕ θ θ ϕ θ ϕ = − + ( sin cos cos cos cos sin ) R cos (9) p p p p p p v ϕ θ ϕ θ ϕ θ ϕ θ ϕ ϕ = − − + ( sin cos cos sin sin cos sin cos sin ) R (10) Let ˆ ˆ ˆ , , r r r x x x y y y z z z = − = − = − that is, the relative coordinate position of the target to the radar, and the false target travel distance is:
0 ˆx ( ) ( )cos( ( ))cos( ( ))dT t
p p p p t v T T T θ ϕ =∫ (11)
p p p p y t v T T T θ ϕ =∫ (12)
0 ˆ ( ) ( )sin( ( ))sin( ( ))dT t
0 ˆ ( ) ( )cos( ( ))dT t
p p p z t v T T θ =∫ (13)
The distance between the aircraft and the radar is ˆ ( ) ur t , the distance between the false target and the radar is ˆR( )t , and the relationship is as follows:
2 2 2 ˆ ˆ ˆ ˆ R( ) p p p t x y z = + + (14)
ˆ ˆ( ) ( )R( ) r t t t α = (15)
Where ( )t α is the distance coefficient, which is the ratio of the distance between the aircraft and the false track to the radar, 0 ( ) 1 t α ≤ ≤ ˆx ( ) ( ) ( )cos( ( ))cos( ( ))dT t t v T T T α θ ϕ = u t ∫ p p p
0 ˆ ( )
y t = u t (16)
∫ ( )sin( ( ))cos( ( ))dT
v T T T
θ ϕ p p p
0 ˆ ( )
z t = u t ∫
( )cos( ( ))dT v T T
ϕ p p
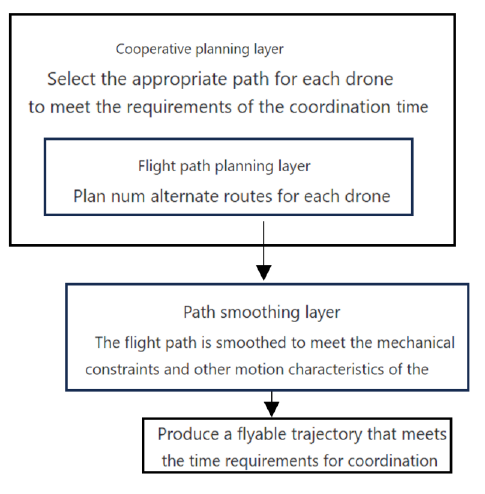
0 Number Optimization Model of Uniform Linear Motion UAV: Under the condition of uniform linear motion of UAVs, the number of UAVs in achieving the specified false target track is optimized. According to the concept of homology test, and a drone can only interfere with one radar at the same time, at least 3 drones need to interfere with three radars at the same time. Secondly, because the speed of the drone is uniform, the distance generated by each drone is also certain at the same time of the time interval. Therefore, the constraint conditions of UAV cooperative deception jamming are determined, and the direction and speed of UAV are adjusted by adjusting its flight height to meet the false target track of a certain section. Based on the idea of hierarchical planning [12], it is divided into three parts, as shown in Figure 3. In the flight path planning layer, each UAV independently generates Num alternative routes, and N UAVs have N*Num alternative paths set. The cooperative planning layer selects the appropriate speed and path for each UAV under the conditions of time and distance constraints. The path smoothing layer smooths the path selected by the cooperative planning layer, satisfies the mechanics and other motion constraints of the UAV, and makes it a flyable flight path, thus obtaining the minimum number of UAV motion optimization models.
The Motion Rule and Cooperative Strategy of Maximum Virtual Track of UAV are Realized
When the virtual track point is known, three UAVs are arranged to work together to realize the virtual track, and the rest of the UAVs can generate as many false targets on different radars as possible according to the constraint conditions, so as to make the virtual track as many as possible. In addition, this paper intends to study the coordinated interference of multiple UAVs on networked radar. Considering UAVs as particles, it can meet the requirements of flight path planning and ignore the influence of wind. Therefore, without loss of generality, the motion characteristics of the UAV can be described by the following three-degree-of-freedom particle model.
cos cos x V ϕ γ = = =
i (17) sin co s y V
ϕ γ i si n z V
γ i where (x, y, H) is the position vector of the UAV, V is its speed, ϕ and γ are the heading Angle and track inclination Angle respectively. The initial time 0 γ = , its initial state is
0 0 0 0 0 0 ( , , , ( , , ) ) , , ,0 t t t t P x y H x y H ϕ γ ϕ = = = = (18) In order to represent the maneuvering performance constraints on the UAV platform, the following constraint model is established:
( ) V V t V
≤ ≤ ≤ ≤ − ≤ ∆ ≤ ≤ ≤ ≤ ≤ ≤ ≤
min max ( ) t γ γ γ min max v v a m s t R m
10 /
1 i i +
250 (19) i
2000 2500 z i
33 / 50 / m s v m s r r
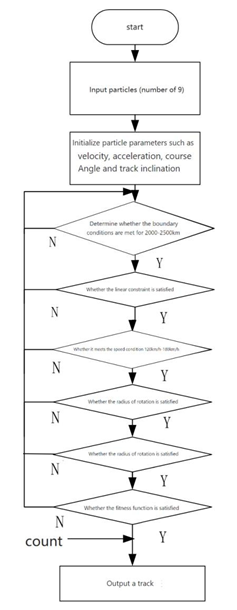
ψ ψ max max Where Vmax and Vmin are the upper and lower limits of speed, max ψ is the maximum rate of change of course Angle, and max r is the maximum rate of change of track inclination. The optimization model of the number of drones is shown in the program block diagram in Figure 4.
Based on the above program block diagram, Matlab was used for programming, and the particle swarm optimization algorithm was improved. After several iterations, the fitness function was satisfied, and the maximum number of tracks satisfying the constraints was finally obtained.
The Motion Rule and Cooperative Strategy of UAV when Radar is Interfered
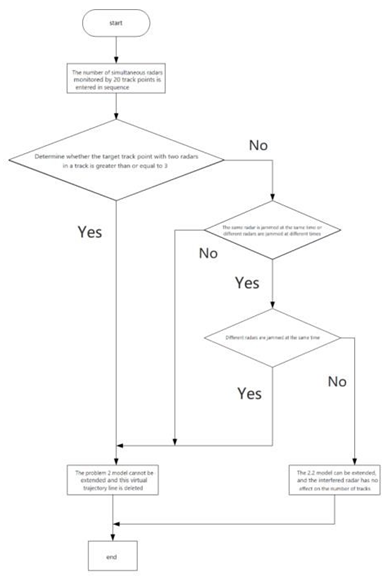
When the radar fails, more false track points are generated. When the two tracks meet the requirements and the location and allocation method of the UAV are determined, the particle swarm search algorithm is used to find the intersection points of the lines between the other two radars and the virtual track points, and the corresponding time is obtained. Then, the new track line is obtained by corresponding to the known track. The steps of PSO are shown in Table 1, and the analysis block diagram of PSO is shown in Figure 5.
| Step1 | The number of simultaneous radars monitored by 20 track points is entered in sequence. |
|---|---|
| Step2 | Determine whether the target track point with two radars in a track is greater than or equal to 3. |
| Step3 | If it is greater than three points, the UAV number optimization model cannot be used to delete the virtual track line; If it is less than three points, go to step4 to judge. |
| Step4 | If the same radar or different radars are interfered by suppression interference or other factors at the same time or at different times, then step5 is performed; Otherwise, determine whether it is the case of different radars at the same time. If it is, the optimal UAV quantity model cannot be used and this virtual track line can be deleted. Otherwise, step5 is performed. |
| Step5 | The UAV number optimization model can be extended, and the interfered radar has no effect on the number of trajectories. |
Table 1: Steps of particle swarm optimization.
Experimental Result
The Motion Pattern of A Drone Specifying A false Target Trace
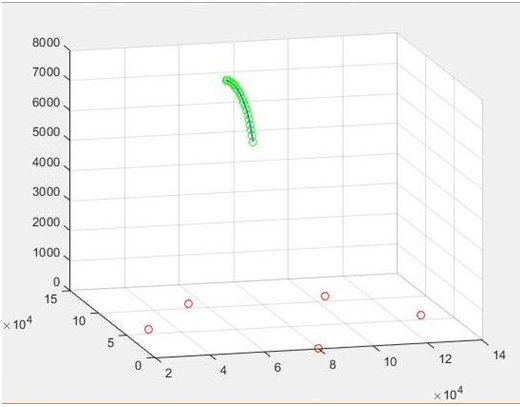
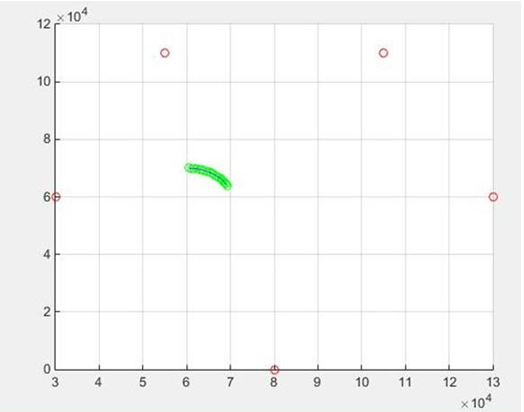
Scheme 1: Hierarchical Analysis Given 20 virtual target track points are shown in Figure 6, and the top view of virtual target is shown in Figure 7.
5*20 lines can be obtained between 5 radars and 20 track points, and the flight path of the UAV will definitely intersect with these lines, and the flight height of the UAV is stipulated to be 2000m~2500m, so the real position space of the UAV can be determined, as shown in Figure 8.
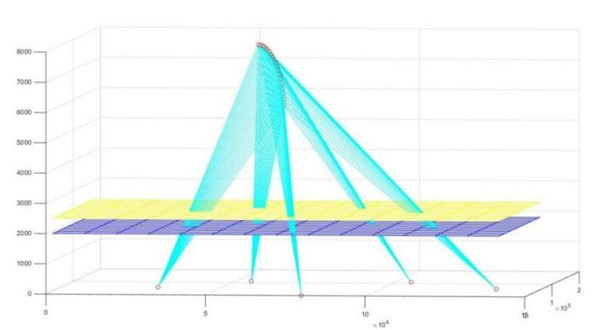
Since the flight height of the UAV is controlled within the range of 2000m~2500m (the allowable operating space diagram of the UAV is shown in Figure1), and the spacing of the UAV should be controlled at more than 100m, the spacing of each layer is preliminarily set at 100m, and the time interval of the relative radar to make the UAV fly position point on each surface is also 10s, and no collision will occur. In a group of aircraft that interfere with the same radar, it is necessary to make these track points collinear as far as possible, so that it may be the flight trajectory of the same drone at different times. However, the interval between the two adjacent time points is 10s. Since the UAV is in uniform linear motion, this paper determines whether the UAV is just in the straight line and plane of the radar and the second virtual point at the next 10s through the distance it has flown in the same interval time.
However, after calculation, the distance between the track points of adjacent drones on the plane is much less than the distance of 10s. This kind of plane analysis of uniform motion of UAV is not reliable.
Scheme 2: Geometric Analysis According to the geometric principle and interference model, the flight trajectory equation of the UAV is established for the plane between the simulated track point and the radar, as shown in Figure 9.
Since the UAV moves in a uniform speed in a straight line, and a UAV can only interfere with the same radar all the time, its unique plane can be determined if its track point is in the direction of z axis, and the corresponding coordinates of the spatial position of the UAV can be obtained by the generated track point and the radar. And determine whether the distance between the adjacent position points of the UAV can achieve uniform linear motion at 120km/h~180km/h within the error range of the radar. If it is within the allowable flight speed range, it is considered that the radar can be interfered with in the same time; If not, reconsider the new track point. By analogy, in order to ensure uniform linear motion of the UAV, this paper selects two intersection points at different levels as a trajectory, and selects the flight path as shown in Figure 9, such as route 1”2’, 2”3’... As many points as possible exist among them as the trajectory point coordinates of the drone. All the integrated paths are classified, as shown in Figure 10, and then optimized to find a total of 31 trajectories with the least required UAV and as many interference points as possible.
In the process of jamming, multiple jammers need to cooperate together to achieve the purpose of fusing multiple false targets into the same target in space. Therefore, taking the distance coefficient as the variable to optimize the jammer motion model can make the optimization model more reasonable. In the course of flight, due to the influence of power or other factors, the arrival position of the jammer at a certain time deviates from the ideal position, resulting in the deviation between the distance false target and the ideal situation. As shown in Figure 11, the figure shows the position of radar, the position of jammer in ideal state, the position of false target, and the position of false target under error condition.
In the process of jamming, multiple jammers need to cooperate together to achieve the purpose of fusing multiple false targets into the same target in space. Therefore, taking distance coefficient ( )t α as the variable to optimize the jammer motion model can make the optimization model more reasonable. In the course of flight, due to the influence of power or other factors, the arrival position of the jammer at a certain time deviates from the ideal position, resulting in the deviation between the distance false target and the ideal situation. As shown in Figure 11, Ai is the position of radar, Ukj, Ukm are the position of jammer in ideal state, Pi, Pm’ are the position of false target, and Pm is the position of false target under error condition.
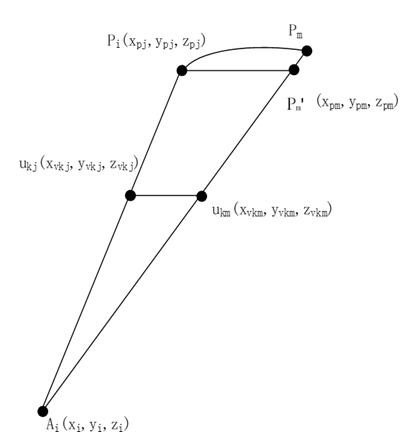
Since it is stipulated in the radar performance standard [13] that the error of measuring object distance by fixed range mark and moving range mark should not exceed 1% of the maximum distance of the used display range or the larger one within 30m, the pseudo-target position Pm’ is approximately regarded as point Pm, and the pseudo-track PjPm is approximately regarded as a straight line, as shown in Figure 11, thus simplifying the model.
According to the radar coordinates provided and the coordinates of the virtual target point, the corresponding i i A P L and i m A P L can be obtained, and linear equations of lines i i A P L and i m A P L intersected by lines ukj and ukm and plane 1 are selected from the first plane of z=2000~2500.
the points x x y y z z L x x y y z z
− − − = = − − − − − − = = − − −
pi pi pi A P pi ri pi ri pi ri
:
i i (20) x x y y z z L x x y y z z
pm pm pm A P pm rm pm rm pm rm
:
i m The height in the space coordinates of the UAV is
The Motion Rule of Maximum Virtual Track of UAV
After Matlab program simulation, a large number of determined according to the plane where it is located, that is, the point coordinates simultaneously. Xukj , Yukj and Xukm , Yukm of the UAV are solved.
kj km u u L of the UAV is It can be concluded that the linear equation x x y y − − = − − ukj ukj (21) x x y y ikj ukm ukj ukm z uk
| Step1 | Calculate whether the distance between two points meets the speed requirement |
|---|---|
| Step2 | Optimization model |
| Step3 | Calculate the coordinate position of the UAV track point |
Table 2: Analysis steps (programming steps).
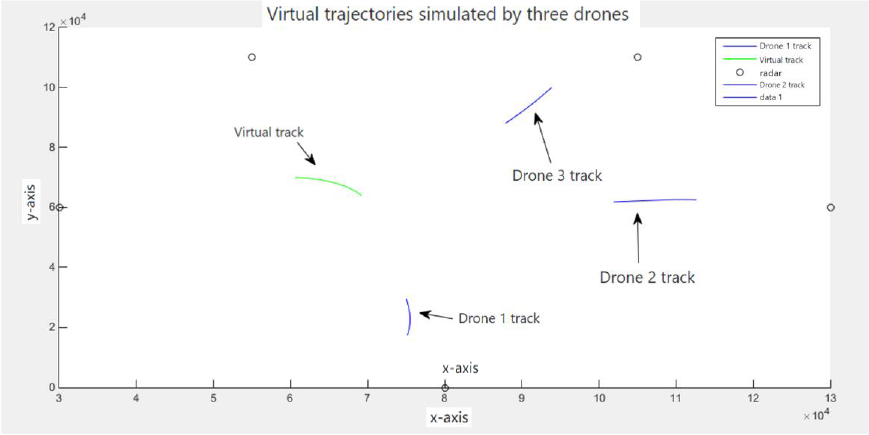
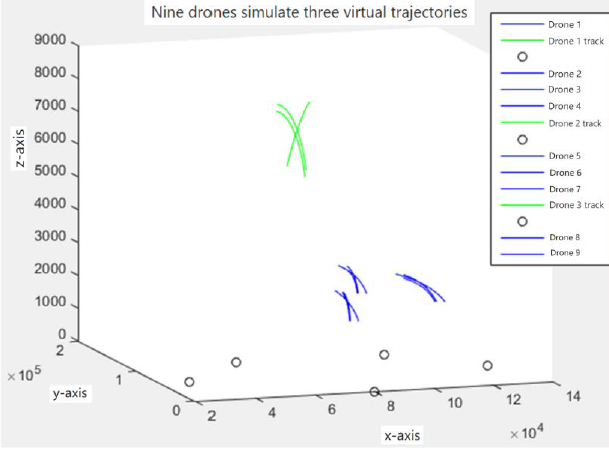
point set data are obtained, and finally three false flight paths including the first known virtual flight path are obtained. Figure 12 shows the trajectory route of nine UAVs, and Figure 13 shows the generated virtual flight path map.
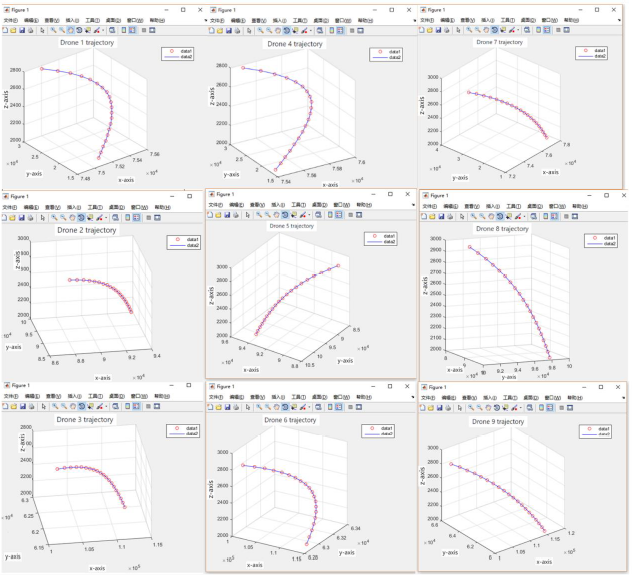
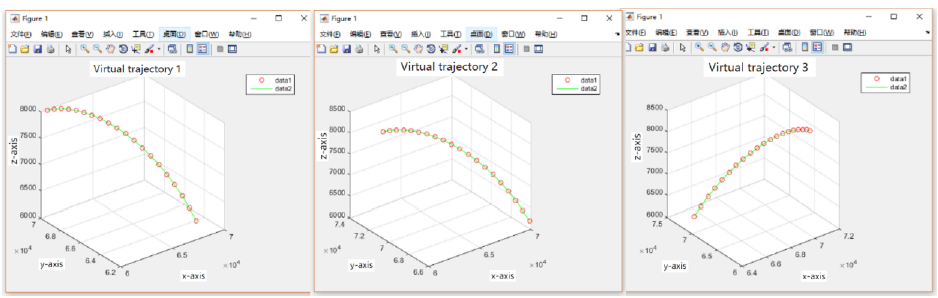
Figure 13: Virtual flight path map First of all, it can be seen from Figure 12 that the path of the UAV is a smooth blue curve, and there is not much turning and climbing when the radius of rotation is met. Secondly, after calculation, the distance between adjacent interval points is 330m to 500m, and the speed range of the drone is (33m/s, 50m/s). Therefore, the next node can be reached within 10 seconds. The speed of the UAV is 33m/ S-50m /s for variable speed movement, meeting the motion law.
As can be seen from Figure 13, the generated virtual track is a smooth green curve, which satisfies the motion law.
The above (Figures 14 & 15) show the display of the three virtual flight paths generated in the same space.
The Motion Pattern of UAV when Radar is Jammed
After the location and allocation method of the UAV are determined, the particle swarm search algorithm is used to find the intersection point of the other two radars and virtual track points, and the corresponding time is obtained. Then, the new track line is obtained by corresponding to the known track. In this process, PSO approximates the optimal solution by simulating the foraging process of birds and constantly updating the speed and position of particles, so as to achieve accurate prediction of the target location. Specifically, PSO generates a set of random particles in the initial phase, each representing a possible solution. Then, according to the fitness function of the particle (that is, the error function), the speed and position of the particle are gradually adjusted to make it close to the global optimal solution.
After the new track line is determined, the radars of 20 track points are entered in turn to monitor the number at the same time, and the target track point with two radars in one track is judged whether it is greater than or equal to 3. If it is greater than or equal to 3 points, it means that the track is supported by strong radar detection and cannot be extended to optimize the number of UAVs, so this virtual track line needs to be deleted. Specifically, this is because in this case, the number of track points detected by the radar is large enough to support the trajectory analysis and identification of the target, and it does not need to be optimized by increasing the number of drones. If it is less than 3 points, the following judgment is continued: First, it is determined whether the same radar is affected by suppression interference or other factors at the same time or different radars at different times. If this situation is satisfied, the UAV number optimization model can be extended, and the interfered radar has no effect on the number of trajectories. Specifically, this is because in the case of interference, the detection effect of the radar will be affected, resulting in a reduction in the number of detected track points, so it can be supplemented by increasing the number of drones, thereby improving the detection effect of the trajectory. If the above interference conditions are not met, it is further determined whether the situation is the same time for different radars. If different radars detect track points at the same time, it means that these points have high reliability, cannot be extended to the UAV number optimization model, need to delete this virtual track line. Specifically, this is because the track points detected by different radars at the same time have a high consistency, indicating that these points are real target track points, which do not need to be supplemented by increasing the number of drones. If it is not the track point detected by different radars at the same time, the UAV number optimization model can be extended, and the interfered radar has no effect on the track number. In this case, it can be considered that the number of track points detected by radar is insufficient, which can be optimized by increasing the number of drones, so as to improve the detection effect of the track. Specifically, the number of track points in this case is small, which may be due to radar detection range, detection accuracy and other reasons, so it can be supplemented by increasing the number of drones, thereby improving the integrity and accuracy of the track.
On the premise of simulating the movement law of the UAV and the false target track point given by the coordination strategy, the model is solved and another track is obtained. In the end, a total of three flight paths can be simulated. Specifically, by simulating the motion law and cooperative strategy of UAV, false target track points can be generated, and these false track points can form a certain track within the monitoring range of radar, so as to disturb and confuse the radar system.
In the process of solving, the optimization algorithm is used to solve the model, and the optimal flight path scheme is obtained. Specifically, the particle swarm optimization algorithm is used to optimize the trajectory of the UAV, so that it can generate false target track to the maximum extent under certain constraints, so as to achieve effective interference to the radar system.
Finally, the location and allocation of the UAV are determined, the false target track points are generated, and the optimization algorithm is used to solve the model, and finally three target tracks are simulated, so as to achieve effective interference and deception of the radar system. In this process, the motion law and coordination strategy of the UAV, as well as the detection range, detection accuracy and interference of the radar are considered, and the accurate simulation and optimization of the target trajectory are realized by comprehensive use of optimization algorithms and simulation technology.
Conclusion and Discussion
Under the constraint condition of uniform linear motion of UAV, the formation principle of false track of UAV in three- dimensional space is analyzed, the kinematic relationship between UAV and false target track is obtained, and the number optimization model of UAV is established. The model can intuitively and accurately reflect the impact of UAVs on false track points. The hierarchical idea is adopted, the search algorithm is used to solve the minimum number of UAVs to achieve the target false track, and the motion law of each moving UAVs is obtained. The results show that the model is practical.
On this basis, considering the constraint conditions of UAV maneuverability, particle swarm search algorithm is used to establish the UAV number optimization model. The model considers the possible maneuvering situation of the UAV [14], and can clearly reflect the motion conditions and motion rules when the UAV moves to the target position as much as possible to generate the false track point of the target. It can be obtained that the maximum false track can be generated when realizing the given virtual target track coordination. The model is applicable to the actual situation and has guiding significance to the establishment of similar multi-UAV multi-target model.
When the radar receives interference, the number of radars at each detected track point is analyzed [15], and the influence on the false track model when the fault tolerance rate of information acquired by the networked radar system is changed is considered. By realizing the given false target track and generating as many false tracks as possible, the motion rules of all cooperative UAVs are obtained. A new reasonable track is added, and a mathematical model suitable for different network radar systems is obtained. Theoretically, the model can also be applied to the networked radar system with different number of radars, and the model can be easily managed and optimized when the performance and constraint conditions of UAV jamming radar change.
The models proposed in this paper include: Uniform linear motion UAV quantity model: According to the constraints of the UAV, the kinematic relationship between the UAV and the false target is analyzed, and the flight height and speed of the UAV are selected. UAV collaborative task planning model: including the position relationship analysis of the real track under constraints such as UAV movement time and radar failure.
Through these models, it can quickly and accurately solve the actual conditions of UAV speed and altitude, realize the creation of as many false tracks as possible under the conditions of given false tracks, and obtain the motion rules of each UAV. The availability of the model is verified through data and simulation experiments. Theoretically, this model can also be used for networked radar systems under different states of radar number and location. The processing ability of UAV jamming radar to generate false target track points is optimized.
Conflict of Interest
We have no conflict of interests to disclose and the manuscript has been read and approved by all named authors.
References
-
Pengcheng G, Jingjing W, Longshun Y (2022) Status and prospect of radar ground target recognition technology. Aeronautical Weapons 29(2): 1-12.
-
Zhang L, Luo Y, Zhang Q (2023) Review of countermeasures against active jamming for radar networking systems. Information Countermeasures Technology 25(6): 1-16.
-
Chongying Q, Feng H, Chen C (2023) Research on key technologies of multi-radar networking and cooperative detection. Command, Control and Simulation 45(6): 42- 46.
-
Zhu J, Gu L, Li R (2022) Research on collaborative interference modeling of networked radar by multiple UAVs. Science and Technology Innovation 32(26): 188- 191.
-
Deng Y, Wenguang L, Jiahao G (2023) Research on multi- UAV cooperative search and jamming algorithm. Tactical Missile Technology 34(5): 10-18+113.
-
Ren X (2023) Research on Deception jamming Technology of Networked radar based on Multi- UAV. University of Electronic Science and Technology of China.
-
Ding C, Ziqing Y (2024) Multi UAV collaborative deception jamming technology based on improved whale algorithm. Telecommunication Technology 64(1): 67-73.
-
Changwen L, Wen G (2023) Cooperative jamming strategy of multiple UAVs on networked radar. Wireless Internet Technology 20(4): 121-124.
-
Jinbo F, Zhang D, Wang M (2023) Uav track planning for improved target positioning accuracy. Acta Ordnance Engineering 44(11): 3394-3406.
-
Wang L (2023) Research on UAV flight path Planning based on improved Sparrow Search algorithm. Yancheng Institute of Technology.
-
Liu Y, Chen Y, Yu X (2024) Multi-uav cooperative deception jamming technology based on improved particle swarm optimization algorithm. Ship Electronic Countermeasures 47(1): 72-76.
-
Zhang C, Yunyang L, Yang S (2018) Uav collaborative optimization based on hierarchical planning. Journal of Beijing University of Architecture and Architecture 34(1): 70-75.
-
Tian H, Xu Y, Shen X (2020) Research on calibration simulation of positioning accuracy of UAV warning radar. Computer Simulation 37(9): 45-47+54.
-
Gao Y (2022) Research on UAV Collaborative Flight path planning method based on reinforcement learning. University of Electronic Science and Technology of China.
-
Dang L, Jianbin L, Peng P (2024) Study on anti-jamming performance evaluation of integrated system of maritime radar area. Ship Electronic Countermeasures 47(2): 47- 51.
- Revolutionizing Property Measurement Through Artificial Intelligence: The Journey of PropertyMeasure.ai
- AI Infused Business Model Innovation for Competitive Advantage in the Era of Big Data and Digital Transformation
- Use of CPM/PERT in the Effort to Eradicate Polio
- Integrated Multimodal Deep Learning Framework for Early Detection of Mouth Cancer Using CT Imaging and Clinical Symptom Analysis
- Artificial Intelligence in Medical Robotics and Assistance: An Overview
- Server Migration with Multipath-QUIC