Development and Ergonomic Evaluation of a Coconut Palm Climbing Device
Harvesting of coconut is very difficult and tedious work due to non-branched structure of the coconut palm. Only skilled persons can do this work. In Gujarat coconut palm growers are completely depend on the trained climbers who climb up unsafely without using any equipment. To resolve this, a sitting type coconut palm climbing device was developed at Department of Farm Machinery and Power Engineering, College of Agricultural Engineering and Technology, Junagadh Agricultural University, Junagadh. It has two units such as the upper unit that provides seating facility to the operator and the lower unit that is actuated by legs. The device was designed as per the anthropometric dimensions of the climbers of Saurashtra region. The main components of the device were approach section, junction, seat support pipe, base pipe, seat, telescopic pipe, metal rope, and gripping face plate. Total weight of the device was 4.5 kg. The device was able to sustain the external load up to 160kg. For field testing and ergonomic evaluation, independent variables such as operator (O1, O2 and O3) and height of coconut palm (7,9 and 11 m) were selected. Operator O3 with developed device achieved the highest ascending speed (26.60 cm /s) and descending speed (27.16 cm /s). The highest climbing capacity with developed device was found to be 13palm/h with operator O3. Increase in heart rate (21.82%) and body temperature (1.03%) were found lowest with the combination of operator O3 at 7 m height of coconut palm.
Introduction
Coconut (Cocos Nucifera L.) belongs to the family of palms. Coconut is mainly grown in tropical regions. India is the third largest coconut producing country having an area of about 1.97 million ha with a production of 15.7 million tons [1].
Generally, in India climbers manually climb up the coconut palm with bare hand and feet. With the coconut palm climbing device, climbing up the coconut palm becomes easier for any non-climber person because it needs a lot of practice otherwise it may cause injury. Presently at the time of harvesting the nuts, it is compulsory to climb up the coconut palm but only trained climbers can do it. At the time of climbing, feet and hands of climbers rub continuously with the trunk of the coconut palm. Figure 1 shows the ill effects on the feet and hands of the coconut palm climber. George, et al. [2] reported that total 35.5% (78 cases out of 220) climbers fell down from coconut palm while doing their job manually. The body weight and Body Mass Index (BMI) of the climber showed significant decline as compared to those of the non-climbers. The data revealed that the coconut palm climbers are having prominent pes cavus, varus feet and abducted toes.
![Figure 1: The ill effect on the feet & hands of the coconut palm climber, George, et al. [2].](/fulltextimages/3607/fig_1.jpeg)
A. Feet of a coconut palm climber (> 20 years of experience), showing callosities (arrows) in the ankle region. B. Right foot of a coconut palm climber with amputated medial toes (arrow), C. Occupational mark (arrows) in palmar aspect of hands in a coconut palm climber. D. Occupational mark (arrows) the forearm skin in a coconut palm climber.
Mohankumar, et al. [3] conducted a study on ergo- refinements of an existing coconut palm climbing device and compared it with the existing one. Agricultural workers employed for coconut palm climbing suffer musculoskeletal disorders. The inclination of upper frame of climbing device is increased with respect to the horizontal, while moving towards the top of the palm. Joseph [4] developed first model of coconut-climbing device which was standing type having two frames (left and right). Each frame was having flexible adjustable encircling iron rope mounted around a tree and tree gripping rubber pad. The two main frames were fitted on the tree side by side enabling the operator to lift the frames conveniently using the sliding member.
Now a days, different coconut palm climbing are devices available. However, safety and efficiency aspects of these devices have not been studied much. Ergonomic evaluation of farm tools will result in achieving better harmony and coordination between the tools and the worker [5]. Hence, an ergonomically suitable coconut palm climbing device was developed at Department of Farm Machinery and Power Engineering, College of Agricultural Engineering and Technology, Junagadh Agricultural University, Junagadh for the climbers of Gujarat to enhance their workability and safety for this dangerous work.
Material and Methods
Girth of total 54 coconut palms and anthropometric parameters of ten Saurashtra region (Mangrol, Maliya, Mendarda, Veraval and Kodinar Talukas) climbers were measured. Using these parameters, optimize dimensions of the various parts of the device were decided.
Girth of Coconut Palm
The girths were measured at three levels of height i.e. at one meter height above ground level, at the middle and at one meter below the junction of trunk and crown. Because at the time of climbing the coconut palm, developed device should fix throughout the height of the palm.
Design Consideration
The coconut palm climbing device was developed with sitting facility. Because at the time of working, there are four widely used postures, these are standing, bending, squatting and sitting. The sitting posture is superior to all postures in several ways [6]. Body dimensions of male agricultural workers of Saurashtra region were measured. Their anthropometric parameters with mean, standard deviation, 5th percentile and 95th percentile are shown in Table 1. Nomenclatures for parameters were as per NBL [7]. In relation to these data, dimensions of the device were considered.
| S.No | Parameters | Mean | Standard Deviation, % | 5th percentile | 95th percentile | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | Weight, kg | 59.33 | 4.51 | 55.4 | 63.53 | ||||||||||||
| 2 | Sitting popliteal height | 44 | 3.77 | 39.3 | 48.45 | ||||||||||||
| 3 | Buttock-knee length | 52.83 | 1.76 | 45.2 | 60.33 | ||||||||||||
| 4 | Hip breadth (sitting) | 32.17 | 1.89 | 27.3 | 36.45 | ||||||||||||
| 5 | Buttock height | 90.33 | 5.03 | 85.6 | 94.53 | ||||||||||||
| 6 | Grip diameter (inside) | 4.93 | 0.29 | 4.55 | 5.98 | ||||||||||||
| 7 | Foot length | 25.5 | 2 | 23.7 | 25.5 | ||||||||||||
| 8 | Foot breadth (ball of the foot) | 10 | 1 | 9.1 | 11 |
Table 1: Anthropometric parameters of the agricultural workers.
Components of the Device
Sitting type coconut palm climbing device consists two unit namely upper unit and lower unit. Upper unit stands for sitting facility to the operator while lower unit provides base for actuation. Detailed assembly of sitting type coconut palm climbing device is presented in Figure 2. Total four Approach section pipes were used in whole device. Approach section made of GI square pipe having square cross section of 16 mm with 2 mm thickness and 280 mm length. Seven holes of 8 mm diameter were drilled at the distance of 25 mm on it, so that telescopic pipe arrangement easily fix over it as per the girth of the coconut palm. In whole device M6×50 mm full threaded bolts were used. Total two junctions were fabricated for the device namely upper junction (at upper unit) and lower junction (at lower unit). Upper junction helps to joint approach section with seat support pipe for upper unit while lower junction helps to joint approach section with feet rest. Due to gripping face plate that equipped with tire pieces, the device does not harms the stem of the coconut palm. And it was welded with the base pipe with an angle of 135°. Telescopic pipe is used to provide adjustment to the device with different girths of coconut palm and it holds the 6 mm plastic coated metal rope. 6 mm metal rope is sufficient for climbing device [8]. For sitting facility of the operator, heart shaped bicycle seat (210×180 mm) was used and its dimensions were decided using hip breadth values from Table 1. The seat was fixed on seat support pipe. Here, 5th percentile of inside grip of the labourers was 45.5 mm so seat support pipe having 29 mm inner cross section with 1.5 mm thickness was selected. Operator actuates the upper unit by holding the seat support pipe. Its length was kept as 435 mm because by keeping in view the buttock-knee length. Feet rest is the main component of the lower unit of the device. Total four GI square pipes (16×16 mm) with 2 mm thickness and the length of 140 mm were welded with the 32×32 mm pipe in such a way that toe lift the front pipe and heel push the rear pipe. Rubber grips were provided for operator’s comfort. According to feet length and breadth it was fabricated. Development of the proposed device with detailed description about each component given in the study [9]. Figure 3 shows working of sitting type coconut palm climbing device. At the time of working, when the center of gravity of the user shifts outside of the body and the user feels insecure and unstable [10]. In case of the developed device at any portion of the trunk makes 90° with the trunk so that operator feels safe.
![Figure 2: Total four Approach section pipes were used in whole device. Approach section made of GI square pipe having square cross section of 16 mm with 2 mm thickness and 280 mm length. Seven holes of 8 mm diameter were drilled at the distance of 25 mm on it, so that telescopic pipe arrangement easily fix over it as per the girth of the coconut palm. In whole device M6×50 mm full threaded bolts were used. Total two junctions were fabricated for the device namely upper junction (at upper unit) and lower junction (at lower unit). Upper junction helps to joint approach section with seat support pipe for upper unit while lower junction helps to joint approach section with feet rest. Due to gripping face plate that equipped with tire pieces, the device does not harms the stem of the coconut palm. And it was welded with the base pipe with an angle of 135°. Telescopic pipe is used to provide adjustment to the device with different girths of coconut palm and it holds the 6 mm plastic coated metal rope. 6 mm metal rope is sufficient for climbing device [8]. For sitting facility of the operator, heart shaped bicycle seat (210×180 mm) was used and its dimensions were decided using hip breadth values from Table 1. The seat was fixed on seat support pipe. Here, 5th percentile of inside grip of the labourers was 45.5 mm so seat support pipe having 29 mm inner cross section with 1.5 mm thickness was selected. Operator actuates the upper unit by holding the seat support pipe. Its length was kept as 435 mm because by keeping in view the buttock-knee length. Feet rest is the main component of the lower unit of the device. Total four GI square pipes (16×16 mm) with 2 mm thickness and the length of 140 mm were welded with the 32×32 mm pipe in such a way that toe lift the front pipe and heel push the rear pipe. Rubber grips were provided for operator’s comfort. According to feet length and breadth it was fabricated. Development of the proposed device with detailed description about each component given in the study [9]. Figure 3 shows working of sitting type coconut palm climbing device. At the time of working, when the center of gravity of the user shifts outside of the body and the user feels insecure and unstable [10]. In case of the developed device at any portion of the trunk makes 90° with the trunk so that operator feels safe.](/fulltextimages/3607/fig_2.png)
Capacity of the Device
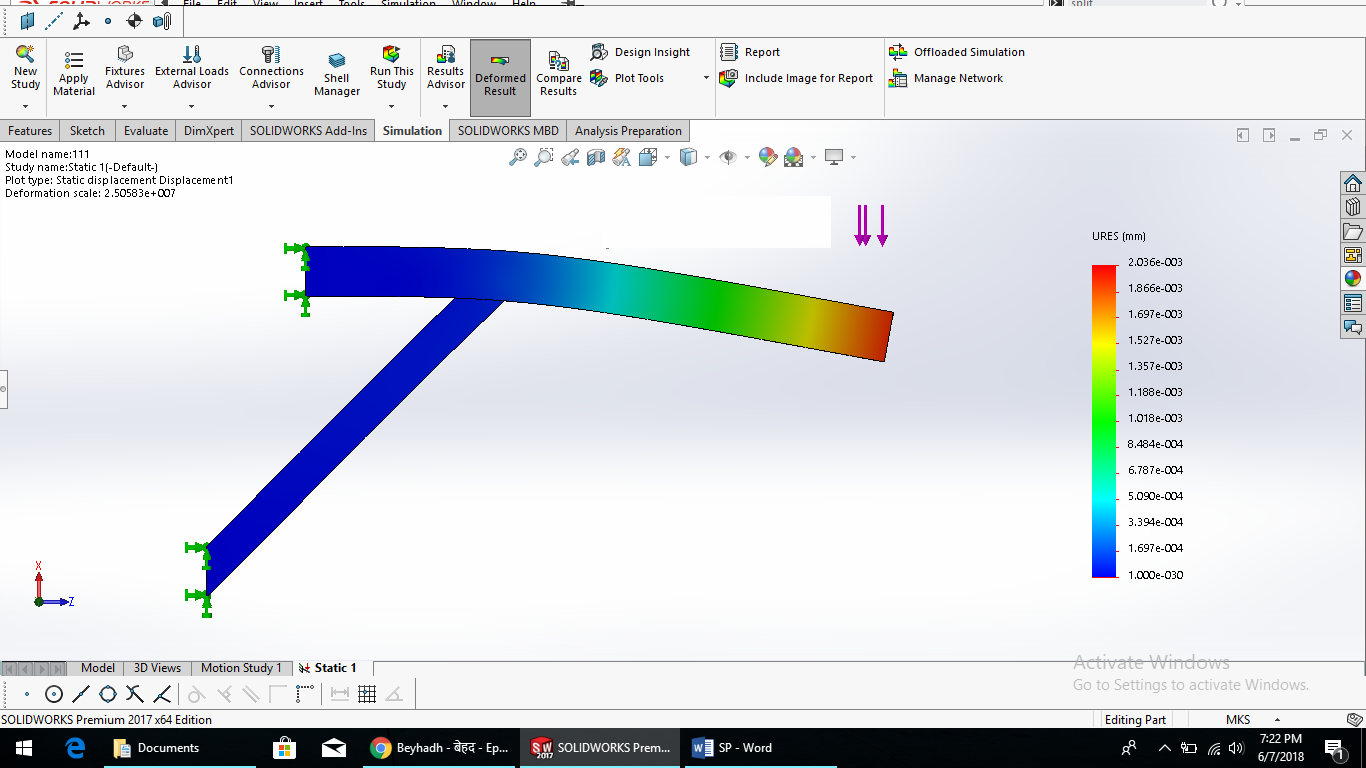
Maximum allowable stress of the device was found using SolidWorks software. It was found as 160 kg. Deformation found in GI square pipes was within limit when 160 kg load was applied at the seat part of the developed device. Screen shots taken at the time of using software is shown in Figure 3.
Results and Discussion
The sitting type coconut palm climbing device was developed and tested for following different parameters. Out of ten, three climbers were selected for the study on Figure 4: Sitting type coconut palm climbing device.
the basis of their age i.e. Operator O1 (37 year), Operator O2 (52 year) and Operator O3 (28 year). Coconut palms having heights of 7m, 9m and 11m were chosen for experiment.

Ascending Speed
Ascending speed means speed of operator at the time of climbing the coconut palm. It was calculated by observing the time required to reach up to the crown of the coconut palm. A stopwatch was used to measure the time. It was found that operator O3 was working with Figure 5: Mean values of ascending speed of different operators.
30.00 Ascending speed, cm/s
0.00 maximum speed (26.60cm/s) whereas operator O2 was working with minimum speed (20.71cm/s) as shown in Figure 5. This is because operator O3 has lowest weight and highest buttock height among three. Moreover, OperatorO3 is youngest whereas operator O2 is oldest among three.
Descending Speed
It means speed of operator while coming down from the crown of the coconut palm. The graphical representation of mean values of the descending speeds of the operators is shown in Figure 6.
30.00 Descending speed, cm/s
Operators O1, O2 and O3 are engaged in this profession for last 20, 34 and 13 years respectively. Figure 7 shows that the highest climbing capacity 13 palm/h was found with operator O3 whereas the least climbing capacity 11 Figure 7: Mean values of climbing capacity of different operators.
14 Climbing capacity, palm/h
Increase in Heart Rate
All three operators O1, O2 and O3were skilled climbers and dealing with coconut palm climbing profession for many years. Therefore, climbing with the device was completely new thing for them. Firstly, primary training was given to them on climbing with the help of the developed device. After fifteen days training and practice they were able to climb on the coconut palm with the device. The average variation in work pulse (ΔH) value of found that the combination of operator O2 and 11 m height of coconut palm found maximum increase in heart rate as 30.54% whereas minimum increase in heart rate (21.82%) was found with interaction of operator O3 at7 m height of coconut palm. This increment was under acceptable limit of 40beats/minute for sustained working [11]. Comfort of the operator decreases as height increases.
- 35.00
- 27.43
- 28.88
- Increase in heart rate, %
- 30.00
- 23.79
- 25.00
- 20.00
- 15.00
- 10.00
- 5.00
- 0.00
- O1
- O2
- O3
- Operator
Table 2: Effect of interaction of operator and height of coconut palm on heart rate.
| Height of coconut palm, m | Increase in heart rate, % | ||
|---|---|---|---|
| Height of coconut palm, m | Operator | ||
| Height of coconut palm, m | O1 | O2 | O3 |
| 7 (H1) | 25.48 | 27.81 | 21.82 |
| 9 (H2) | 28.07 | 28.3 | 23.19 |
| 11 (H3) | 28.75 | 30.54 | 26.35 |
Increase in Body Temperature
It was found that the combination of operator O2 and 11 m height of coconut palm found maximum increase in heart rate as 1.90% whereas minimum increase in body temperature (1.03%) was found with interaction of operator O3 and 7 m height of coconut palm that is shown in Table 3.
| Height of coconut palm, m | Increase in body temperature, % | ||
|---|---|---|---|
| Height of coconut palm, m | Operator | ||
| Height of coconut palm, m | O1 | O2 | O3 |
| 7(H1) | 1.49 | 1.38 | 1.03 |
| 9(H2) | 1.54 | 1.47 | 1.22 |
| 11(H3) | 1.67 | 1.9 | 1.7 |
Table 4: Table 3: Effect of interaction of operator & height of coconut palm on body temperature.
Energy Expenditure Rate (EER)
Energy expenditure is the amount of energy (or calories) that a person needs to carry out a physical function such as breathing, circulating blood, digesting food, or physical movement. It increases with increased in oxygen consumption. The human energy utilized during climbing was found as per following equation [12].
EER, kJ/min = (0.159 × Heart rate, beat/min)-8.72 (1)
It was found by putting heart rate values recorded after each treatment. The graphical representations of mean values of the increase in energy expenditure rate for different operators are shown in Figure 9. It is found that increase in energy expenditure rate was minimum for operator O3 followed by O1 and O2 respectively.
Subjective Evaluation
The subjective evaluation of the operators’ feeling with method of harvesting was carried out on the basis 6- 20 scale ratings [13] as shown in Table 4. In it score 6 indicates excellent and score 20 indicates as very bad.
Overall ease and safety ratings given by operators for developed device as well as manual method of harvesting are presented in Table 4. According to ratings given by operators, ease of working was rated better (O1) for developed device followed by manual method.
| Overall ease | Overall safety | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| S.No | Method of harvesting | ||||||||||||||
| O 1 | O 2 | O 3 | O 1 | O 2 | O 3 | ||||||||||
| 1 | Manually | 13 | 16 | 18 | 15 | 17 | 16 | ||||||||
| 3 | Developed device | 12 | 13 | 15 | 10 | 12 | 9 |
Table 5: Subjective evaluation of the operators.
References
-
NHB (2015) Indian Horticulture Database 2014 [On- line]. National Horticulture Board (NHB).
-
George B, Rao M, Kumar A, Suvarna N, D’souza J (2012) Health of coconut palm climber of rural southern India-medical emergencies, body mass index and occupational marks: a quantitative and survey study. J Clin Diagn Research 6(1): 57-60.
-
Mohan kumar AP, Anantha krishnan D, Kathrivel K (2013) Development of ergo refined coconut tree climbing device. Afr J Agri Research 8(44): 5530- 5537.
-
Joseph (2006) Making man reach the moon: Top of tree. Honey Bee 17(1): 14.
-
Thyagarajan R, Kathirvel KK, Jayashree GC (2013) Ergonomic intervention in sugarcane harvesting knives. Afr J Agric Res 8(6): 574-581.
-
Anonymous (2013a) Handbook of Agricultural Engineering. ICAR Pub. New Delhi, pp: 176.
-
NBL (1988) Anthropometry and mass distribution for analogues. Naval Biodynamics Laboratory (NBL).
-
Jaikumaran U, Joseph S, Preman P, Unnikrishnan C, Jitha K, et al. (2016) Design and development of sitting type coconut palm climbing device–Kera Suraksha Coconut Climber. Journal of Tropical Agriculture 54(2): 136-143.
-
Agravat VV, Mohnot P, Desai RH, Balas PR, Yadav R (2018) Development of sitting type coconut palm climbing device. Int J Curr Microbiol App Sci 7(9): 3591-3602.
-
Grimshaw P, Fowler N, Lees A, Burden A (2007) BIOS Instant Notes in Sport and Exercise Biomechanics. Routledge, London 6(2): 269.
-
Kroemer KHE, Kroemer HJ, Kroemer-Elbert KE (1997) Engineering Physiology: Bases of Human Factors/Ergonomics. Van Nostrand Reinhold, New York.
-
Varghese M, Saha P, Atreya N (1994) A rapid appraisal of occupational workload from a modified scale of perceived exertion. Ergonomics 37(3): 485- 491.
-
Borg GA (1982) Psychophysical bases of perceived exertion. Medicine and Science in Sports and Exercise 14(5): 377-381.
- The Expanding Landscape of Road Rage: A Systematic Review of Conflicts Involving Drivers, Pedestrians, and Micromobility
- Validating Cognitive Models of Royal Navy Performance on Control Systems
- Comparing Standard and State-of-the-art Firefighter Coats on Postural Balance and Gait in a Live Burn Environment
- Investigating the Integration of Telemedicine into Clinicians Workflow: A Review of Methods
- Risk Assessment of Ergonomic Factors in a Textile Firm by RULA, REBA and Fine Kinney Methods
- Impact of Self-Esteem Training on Individuals with Disabilities Aged 17-30