Examining Modern Mechanics as a Three-System Classical Mechanics-Based Theory of Moving Systems
Supported through a century of investigation, experimental support, and observational evidence, relativity is accepted as being conceptually sound, mathematically correct, and theoretically valid. Because it is believed to be the only theory that quantitatively explains certain experiments and yields 2 E mc = , there is widespread support that any improvement will take the form of an enhancement to, rather than a replacement of the theory. Despite this degree of support, the seminal derivation of special relativity theory found in Section 3 of On the Electrodynamics of Moving Bodies contains a mathematical contradiction that must be remediated. Specifically, the τ and ξ equations are expressed in terms of x, y, and t, where Einstein derives ξ as ξ τ = c , which is immediately followed by his stating the ξ and τ equations as: 2 vx t c τ β = − and ξ β = − (x vt ) , where 2 2 1 1 v c β = − . The contradiction occurs because the mathematical equality of ξ τ = c is not maintained when both equations are evaluated using most combinations of x, y, and t. As a concrete example of the contradiction, when x=1, v=0, and t=0, we find thatξ = 1 and τ = 0 , such that ξ τ ≠ c . Here, we introduce Modern Mechanics, a three–system, classical mechanics–based model of moving systems, that does not contain the contradiction. While Modern Mechanics shares a common mathematical kernel with relativity, it uses different equations that can be viewed as an enhancement, or improvement, to the special relativity mathematics. Experimentally, Modern Mechanics yields 2 E mc = and produces a quantitatively better result for the Michelson-Morley experiment. Conceptually, Modern Mechanics differs from relativity because it removes the contradiction, concepts and restrictions associated with relativity; integrates kinematics and electromagnetism while retaining the translation equation for moving systems; and offers novel insights into Einstein’s two–system relativity theory derivation (including discussing where and how the inequality is introduced).
Introduction
Relativity theory is one of the most well–recognized theories in modern physics [1]. Over the past century, it has been repeatedly experimentally validated. Without a compelling alternative, this degree of experimental support suggests that relativity is the only theory capable of explaining certain experiments and observations. While open to the idea that quantitative improvements to the theory might be discovered, proponents generally maintain that improvements will extend the theory rather than serve as a replacement. While critics also generally agree that improvements will take the form of an enhancement or alternative theory, they generally do not:
- Agree on the specific problems associated with relativity,
- Explain how relativity can be incorrect and yet provide useful answers, or
- Provide an alternative theory that matches or exceeds the quantitative and explanatory capabilities of relativity theory.
This paper integrates the proponent and critic views by introducing a common mathematical kernel that forms the foundation of relativity theory and a classical mechanics-based alternative called Modern Mechanics. Although Modern Mechanics is a three-system theory that yields final equations that differ from those provided by relativity theory, both theories share a common mathematical foundation and generally make identical or nearly identical quantitative predictions. Mathematically, this paper demonstrates that every step in Einstein’s X axis derivation is explained using classical mechanics and shows that Modern Mechanics also produces $E = mc^2$. It also remediates the contradiction found in Einstein’s paper where the equality $\xi = \tau c$ used to derive the $\xi$ equation is not maintained. Specifically, the $\tau$ and $\xi$ equations are expressed in terms of $x, y,$ and $t,$ $\xi$ is derived as $\xi = \tau c,$ and the $\xi$ and $\tau$ equations are:
$$\tau = \beta \left( t - \frac{vx}{c^2} \right) \quad \text{and} \quad \xi = \beta \left( x - vt \right), \quad \text{where} \quad \beta = \frac{1}{\sqrt{1 - \frac{v^2}{c^2}}}.$$
The contradiction occurs because the mathematical equality of $\xi = \tau c$ is not maintained when both equations are evaluated using most combinations of $x, y,$ and $t$. As a concrete example, when $x=1,$ $v=0,$ and $t=0,$ we find that $\xi=1$ and $\tau=0,$ contradicting the statement $\xi = \tau c$ used to derive the $\xi$ equation. Conceptually, Modern Mechanics removes the constraints and paradoxes associated with relativity theory, offers new insights into Einstein’s two-system relativity theory, and maintains or improves upon relativity’s quantitative predictive capabilities.
The analysis presented herein references the derivations found in two of Einstein’s 1905 foundational special relativity papers [1, 2]. Because Einstein’s 1905 papers are viewed as the definitive work, this paper does not explore alternative special relativity derivations, nor does it directly address general relativity.
**Literature Review**
Previous investigations that have challenged the validity of special relativity theory have been unsuccessful [3]. Challenges are grouped into several broad categories. One of the most well-known logical challenges of Einstein’s work was proffered by H. Dingle, who wrote, “What my argument showed was that the theory was untenable because it required each of two clocks to work steadily and continuously both faster and slower than the other.” [4]. Since Dingle’s argument implicitly accepted the validity of Einstein’s mathematical derivation, relativistic concepts were used in the defense of the theory, as was demonstrated by W.H. McCrea’s response to Dingle’s argument [5]. This exchange demonstrates that challenges based on post-derivation inconsistencies (i.e., those associated with relativity paradoxes or logical inconsistencies) are defended using relativistic terms to assert a challenger’s inferior understanding of the theory.
Other challenges are based on the introduction of a new experiment or mathematical equation. In 1933, Miller performed an interferometer experiment with findings that are contradictory to special relativity theory [6]. This challenge was defended by attacking the validity or quality of the new material [7]. A second example is found in the author’s work challenging Einstein’s spherical wave proof where, following the derivation of the equations, Einstein asserts the existence of a spherical wave in the original and transformed frames [1, 3, 8]. The author demonstrates that the second shape is not a spherical wave because all points are not the same distance from a common center, thus invalidating the proof and theory [3, 8]. Although this finding cannot be defended using the approach discussed above, it is defended by ignoring the need to perform the additional check for a constant radius. Specifically, the defense asserts that such a check is unnecessary since, despite Einstein’s statement that the shape must be spherical, he does not explicitly perform this check as part of the derivation. An important conclusion is that any challenge that first requires the introduction of any new equation or experiment, even if it appears textually in Einstein’s work, will be rejected on the grounds that such material is not applicable.
**Discussion**
Because there is limited peer-reviewed material that challenges special relativity theory, there are no well-regarded works that challenge the original special relativity derivation as presented in Einstein’s seminal 1905 work [1]. This paper examines the derivation, prior to the completion of the required spherical wave proof, that establishes the theory. As such, the analysis presented herein cannot be defended using the techniques discussed earlier. An ineffective defense is to ignore the evidence presented and instead assert the validity of a different derivation as proof of the validity of Einstein’s original derivation [9, 10]. While
this allows the defender to maintain a belief in the validity of the theory, it fails to directly address the challenge and does not recognize that assumptions inherent in those alternative derivations also render them incorrect. Rebuttal defenses that address each alternative derivation are beyond the scope of this paper.
The following discussion is focused on understanding the derivation of Modern Mechanics. This paper will begin with an introduction of the Modern Mechanics theory. This theory will serve as a foundation through which relativity will be examined, enabling a comparison between both theories, illustrating the source of the special relativity contradiction, explaining the reasons why relativity requires concepts like length contraction and time dilation, and demonstrating that Modern Mechanics also yields $E=mc^2$.
**Foundational Scenario**
Modern Mechanics is best illustrated, and its associated equations derived, using a foundational scenario consisting of two statements and five questions:
- Statement 1: Imagine a street; on the street is a bus; on the street standing next to the bus is a jogger.
- Statement 2: The jogger performs one activity, which is to run at a constant velocity from the rear bumper of the bus to the front bumper, turn around and then run to the vehicle’s rear bumper.
Answer the following questions:
- How many nouns (i.e., “things”) were introduced in Statement 1?
- Based on existing knowledge, can a bus go faster than a jogger?
- In Statement 2, when given the total length, $L$, run by the jogger, can one half of the total length run by the jogger be determined?
- Did Question 3 above ask to find one half of the total length run by the street, the bus, or the jogger?
- Does the answer of one half of the total length run by the jogger indicate the position of the bus?
Answers: (1) Three: The street, the bus, and the jogger. (2) Yes, a bus can go faster than a jogger. (3) Yes, if given a total length we can find one-half of that length. (4) The jogger. (5) No, assuming the bus is moving, one-half of the total distance run by the jogger provides no information about the bus’s position.
Given the above statements, questions, and answers, we have introduced many of the key concepts associated with Modern Mechanics.
**Foundational Mathematics**
Notice that question three (above), which asks – What is one half the total length the jogger runs? – demands a mathematical answer and will be addressed first. While this question is initially answered using variables directly tied to the textual question, the equation must ultimately be expressed in terms of the length of the bus, the velocity of the bus, and the velocity of the jogger. Once developed, the equations will be used in conjunction with the scenario, questions, and answers to distinguish Modern Mechanics from relativity.
The question is answered, and the mathematics derived as follows:
1. Begin by letting $L$ represent the total length run by the jogger for one cycle, which consists of running from the rear bumper to the vehicle’s front bumper and returning to the rear bumper. Also, let $\xi$ represent half of the total distance run by the jogger, resulting in:
$$\xi = \frac{1}{2} L$$
While this equation answers the question posed above, it is not yet expressed in terms of the length of the bus, the velocity of the bus, and the velocity of the jogger. The remainder of the derivation will express this equation in these terms.
2. Instead of being given the total length $L$, we are given the length that the jogger runs from the rear bumper to the front bumper, $T$, called the forward length, and from the front bumper to the rear bumper, $S$, called the reflected length. Since $L=T+S$, substitution enables the equation to be rewritten as:
$$\xi = \frac{1}{2}(T+S)$$
Notice that when expressed in this form, $\xi$ can also be referred to as the average unidirectional length of the jogger. Also notice that $\xi=T=S$ only when the bus is stationary. In all other cases where $T$ and $S$ exist, $S<\xi<T$.
3. Instead of being given the lengths $T$ and $S$, we are given the velocity, $c$, of the jogger, the amount of time $t$, the jogger takes to travel the forward length, and the amount of time $s$, for the jogger to travel the reflected length. The variables $t$ and $s$ are referred to as the forward and reflected times, respectively. Since $T=tc$ and $S=sc$, through substitution the equation can be rewritten as:
$$\xi = \frac{1}{2}(t+s)c$$
Note that $c$ simply refers to the jogger’s velocity and should not be misinterpreted to mean that a jogger is running at the speed of light.
4. Since a time multiplied by a velocity is a length, we will let $\tau$ represent the time required for the jogger to travel one-half of the total length. This is extracted from $\xi$ and expressed as a separate equation:
$$\tau = \frac{1}{2}(t + s)$$
5. Using substitution, $\xi$ is rewritten in terms of $\tau$, resulting in:
$$\xi = \tau c$$
6. Notice that, in a general sense, a number $N$, can be written as the sum of both of its equal halves, as in:
$$N = \frac{1}{2}N + \frac{1}{2}N \cdot$$
This can be rewritten as:
$$N - \frac{1}{2}N = \frac{1}{2}N.$$ This type of substitution of $t - \frac{1}{2}t$ for $\frac{1}{2}t$ in the $\tau$ equation above allows it to be rewritten equivalently as:
$$\tau = t - \frac{1}{2}t + \frac{1}{2}s$$
$$= t - \frac{1}{2}(t - s)$$
7. Assume that the times $t$ and $s$ are not explicitly provided. Instead, we are given the bus's length, $x'$, and the bus's velocity, $v$. Since we already know the jogger's velocity $c$, we find the forward and reflected times $t$ and $s$ as:
$$t = \frac{x'}{c - v}$$
$$s = \frac{x'}{c + v}$$
8. We solve the $\tau$ equation in two steps. Step A is to solve for the expression $\frac{1}{2}(t - s)$ by substituting the equations for $t$ and $s$, rewriting the $\tau$ equation following this intermediate step as:
$$\tau = t - \frac{vx'}{c^2 - v^2}$$
9. Step B in solving the $\tau$ equation is to replace $t$ from the intermediate step and simplify, resulting in:
$$\tau = \frac{x'c}{c^2 - v^2}$$
Note that this equation can also be found directly from Steps 4 and 7 as:
$$\tau = \frac{1}{2}(t + s)$$
$$= \frac{x'c}{c^2 - v^2}$$
10. Finally, since $\xi = \tau c$, we multiply the time, $\tau$, by velocity, $c$, to produce the length equation:
$$\xi = \frac{x'}{1 - \frac{v^2}{c^2}}$$
Thus, we have found the mathematical equation that answers the question: What is one half the total length that the jogger runs for one cycle (represented by $\xi$), when the known variables are the length of the bus, $x'$, its velocity, $v$, and the velocity of the jogger, $c$?
As a separate exercise, we withhold the length of the bus, $x'$, and instead state that when a timer was at 0, the rear of the bus was at the 0 coordinate, and that when that timer was at time $t$, the front of the bus was at position $x$. Thus, when given $x$, $v$ and $t$, the original problem can still be solved because the length of the bus is found as:
$$x' = x - vt$$
Notice that $t$ is an overloaded variable, since here it refers to the length of time that the bus has been in motion, whereas above it represents the forward time. However, this reuse and association with the bus is acceptable since the forward and reflected times associated with the jogger were intermediate variables that are no longer in use. This overloading conflict is also avoided in cases where namespace context, as is often the case when variables are defined and used within a function, gives the usage of an overloaded variable a separate meaning that is distinct and different from its usage outside of the function [3].
With the mathematical question answered, we must now consider the other questions and answers raised above to explain the important characteristics of Modern Mechanics.
Modern Mechanics
Modern Mechanics is a three-system theory consisting of a stationary system (e.g., the street), a moving system (e.g., the bus), and an oscillating system (e.g., the jogger) [3]. The moving system always moves with respect to the stationary system. However, an oscillating system can move with respect to the stationary or moving system. When the oscillating system moves with respect to a stationary system, it is referred to as a non–nested system relationship [3]. This relationship was discussed in the scenario above. While not explicitly addressed in the scenario or mathematical treatment above, an oscillating system can also move with respect to the moving system, which would be the case had we placed the jogger inside of the bus. When an oscillating system moves with respect to a moving system, it is referred to as a nested system relationship [3]. This paper presents the mathematics for the non-nested system relationship alone.
Mathematically, in Modern Mechanics, ξ represents the average unidirectional length of an oscillating system in a non–nested system relationship. Since c is a velocity and $$ \xi = \tau c, $$
, τ represents the time required for an oscillating
system to travel one-half its total cyclical length in a non–
nested system relationship. Importantly, notice that Modern
Mechanics gives specific meaning to:
$$ \tau = t - \frac {v X ^ {\prime}}{c ^ {2} - v ^ {2}} $$
Which, as discussed in the derivation above, is the first intermediate step in finding τ . It also gives meaning to:
2 2 ' vx $$ \overline {{c ^ {2} - v ^ {2}}} $$
Specifically, this expression is simply one–half of the
difference of the forward and reflected times, or
$$ \frac {1}{2} (t - s). $$ When this expression is subtracted from the forward time, t, it yields τ as shown above. Similarly, when this expression is added to the reflected time, s, it yields the same answer, τ .
A Common Mathematical Kernel
The Modern Mechanics derivation, when summarized as shown in Figure 1, reveals a mathematical kernel common to Modern Mechanics and relativity theory. The equations, specifically steps 1 through 6 in Figure 1, explicitly appear in Einstein’s derivation [1]. However, they are explained through different textual narratives because, as one might expect, a three–system theory and a two–system theory require different concepts and assumptions.
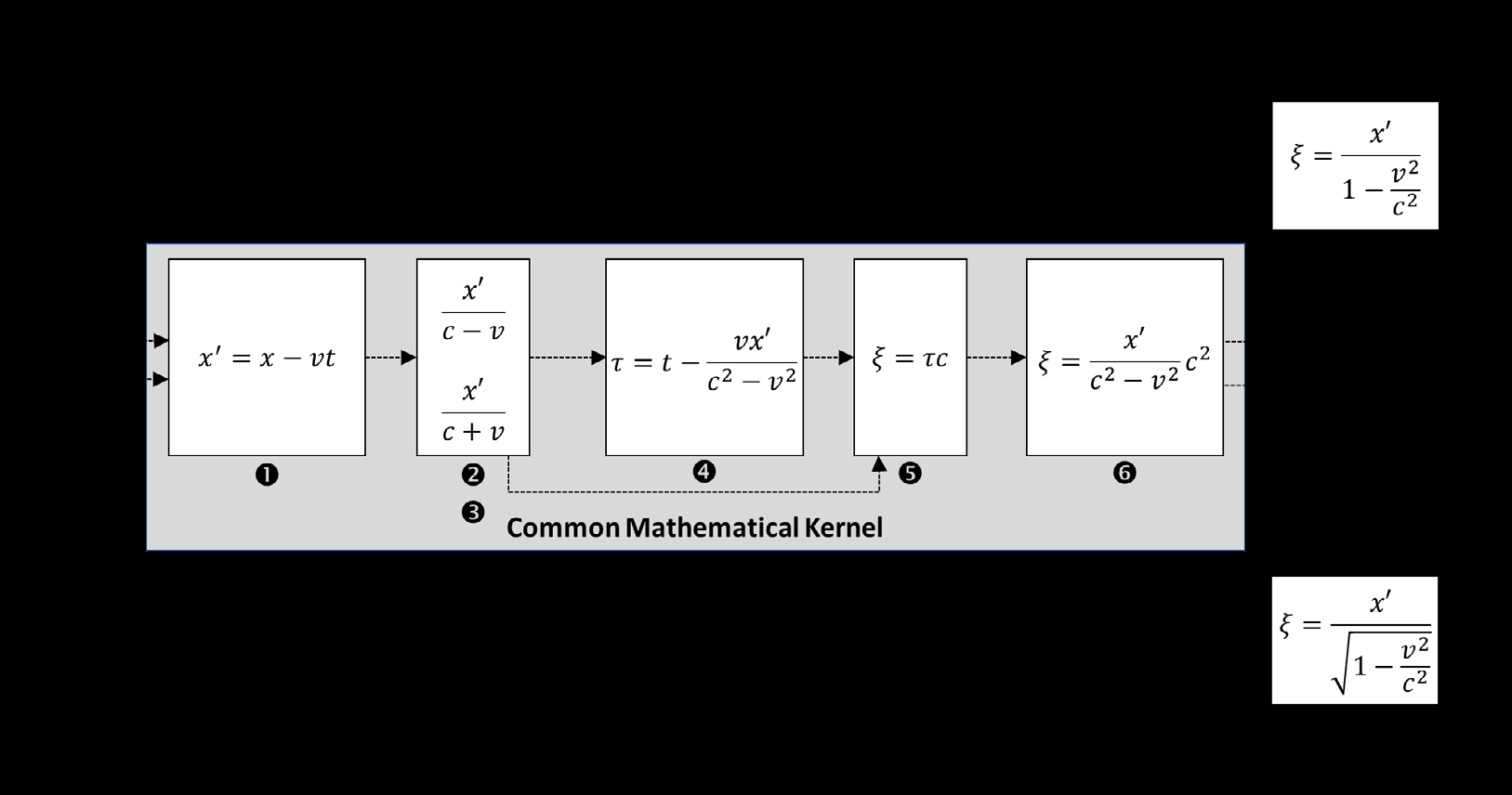
to relativity and Modern Mechanics. The dotted line leading from steps 2 and 3 into step 5 reveals that 𝜏 can be found directly
as the average of
$$ x ^ {\prime} / \left(c - v\right) \text {a n d} x ^ {\prime} / \left(c + v\right). $$
. Each equation and expression identified in steps 1 through 6 explicitly appears
in Einstein’s derivation. Steps 1 and 7 combine to form Einstein’s X axis transformation equation,
( ) Interestingly, while Einstein mathematically uses an oscillating system (i.e., ray of light) as a third system in his derivation, he only explicitly acknowledges the stationary and moving systems in this two–system theory. We are reminded of the answer to question 5 above, which asks about the relationship between one half of the length traveled $$ \xi = \left(x - v t\right) / \sqrt {1 - v ^ {2} / c ^ {2}}. $$ by the oscillating system, ξ , and the position of the moving system. In Modern Mechanics, no relationship exists since ξ is associated with the oscillating system alone. However, we can examine how a relationship between the ξ equation and the moving system must be formed in a two-system theory. Specifically, when an oscillating system is mathematically used to find the $\xi$ equation but an oscillating system does not formally exist in a two-system model, the equation must be explained in terms of the moving system.
Using Modern Mechanics as a reference to understand Einstein’s derivation, he finds the equation for one-half of an oscillating system’s length along the $X$ axis, $\xi$. Additionally, the equations representing one-half the lengths that oscillating systems travel along the $Y$ and $Z$ axes are:
$$\eta = \frac{cY}{\sqrt{c^2 - v^2}}$$
and
$$\zeta = \frac{cz}{\sqrt{c^2 - v^2}}$$
respectively.
Because Einstein does not recognize oscillating systems in a two-system theory, he must associate the $\xi$, $\eta$, and $\zeta$ length equations with the moving system, since associating them with the stationary system is nonsensical. In this context, these equations must replace the Newtonian transformations currently associated with determining the position of the moving system. Specifically, when the moving system is in uniform translatory motion along the $X$ axis, the $Y$ and $Z$ axis transformed values must remain unchanged. This requires each of the equations to be multiplied by $\sqrt{1 - \frac{v^2}{c^2}}$. While unstated but implicitly applied in Einstein’s paper, this multiplication is explicitly shown in Step 7 of Figure 1. This adjustment is not required in Modern Mechanics since $\xi$, $\eta$, and $\zeta$ are properly associated with oscillating systems.
As shown in Steps 7 and 7’ in Figure 1, Modern Mechanics and relativity produce different final equations, illustrating the first mathematical difference between the theories. The Modern Mechanics equation is:
$$\xi = \frac{x'}{1 - \frac{v^2}{c^2}}$$
And the relativity equation is:
$$\xi = \frac{x'}{\sqrt{1 - \frac{v^2}{c^2}}}$$
It is not apparent how two dissimilar equations can produce the same or similar results. This will be addressed by explaining the usage of $x'$ as the numerator in both equations and by investigating how both equations are used in other derivations and experiments. Addressing the usage of $x'$ in the numerator, recall that in Modern Mechanics $x'$ represents the length of a moving system. Specifically, when the moving system is stationary, the moving system’s length is $x' = \frac{1}{2}L$, where $L$ is the cyclical length when the moving system is stationary. Relativity theory’s treatment of $x'$ as $\dot{L}$ and Modern Mechanics’ treatment of $x'$ as $\frac{1}{2}\dot{L}$ represents the second mathematical difference between the theories.
Experimental Alignment and Performance
We must now show that Modern Mechanics makes equal or better predictions when compared to relativity theory. This is accomplished by demonstrating that the Modern Mechanics equation: 1) produces $E = mc^2$ and 2) produces quantitatively better results for the Michelson–Morley experiment [2, 11].
First, we examine the derivation of $E = mc^2$, where both equations are transformed according to the derivation performed in Einstein’s paper [2]. As shown in steps 1 and 1’ of Figure 2, $x'$ is replaced by $L$ to align with relativity theory and the notation used in the derivation, and $x'$ is replaced by $\frac{1}{2}L$ to align with Modern Mechanics [2]. As shown in steps 2 and 2’, the difference, $\Delta$, is $\Delta = \xi - x'$. While the Modern Mechanics and relativity equations are not equivalent, when they are expanded into a series, they share the same first expression, as shown in steps 3 and 3’ of Figure 2. Once treated as a series, Einstein truncates the series by “neglecting magnitudes of fourth and higher orders” [2]. As shown in step 4 in Figure 2, this truncation retains the $\Delta = \frac{1}{2}L/c^2 v^2$ expression, which is common to both series. After truncation, the remainder of the steps performed in Einstein’s derivation are followed to arrive at $E = mc^2$ [2]. The finding that Modern Mechanics produces the same equation means that experiments validating this equation in support of relativity theory also support and validate Modern Mechanics. It also shows that, due to the truncation, the equation is properly stated as $E \approx mc^2$.
![Figure 2: Once treated as a series, Einstein truncates the series by “neglecting magnitudes of fourth and higher orders” [2]. As shown in step 4 in Figure 2, this truncation retains the $\Delta = \frac{1}{2}L/c^2 v^2$ expression, which is common to both series. After truncation, the remainder of the steps performed in Einstein’s derivation are followed to arrive at $E = mc^2$ [2]. The finding that Modern Mechanics produces the same equation means that experiments validating this equation in support of relativity theory also support and validate Modern Mechanics. It also shows that, due to the truncation, the equation is properly stated as $E \approx mc^2$.](/fulltextimages/8207/fig_2.png)
Second, we address the performance of the Modern Mechanics equation in predicting the results of the Michelson–Morley experiment. Modern Mechanics treats ' x in the Michelson–Morley experiment as wavelength, where it represents one-half of an oscillation, or 1 2λ . This represents the third mathematical difference associated with Modern Mechanics. Specifically, as a wavelength-based experiment, wavelengths are averaged rather than added. As a concrete example, consider a light emitted at frequency D cycles per second that is aimed at a mirror located 299,792,458 meters from a stationary emission source. If one were able to count the precise number of cycles that exist in one round trip journey of light from the emission source to the mirror, reflected and returned to the emission source, we would conclude the answer is 2D cycles. In fact, this is the expected answer in the Michelson-Morley paper, where they defined their expected result as +
2 [11]. When v=0, the
2 2 1 v D c equation simplifies to 2D [11]. However, when evaluated using frequency and wavelength, the original frequency, D cycles per second, is unchanged when the light wave is returned to the emission source. Thus, the Modern Mechanics expected answer when v=0 is D cycles per second (or D Hz) instead of 2D cycles [3, 12].
The original Michelson–Morley experimental result is an Earth orbital velocity that “is probably less than one sixth the earth’s orbital velocity, and certainly less than one-fourth”, or approximately 5-8km/s, representing an error of 22-25km/s given an expected result of 30km/s [11]. Relativity requires the expected result to be revised to 0km/s and that the observed result of approximately 6km/s be dismissed as irreducible experimental error. In contrast, when the Michelson-Morley equation used to convert the raw experimental measurements into a velocity is adjusted as discussed above, their results reveal that they detected an Earth orbital velocity of 32km/s [3, 11, 12]. This result has an error of 2km/s given the original expected result of 30km/s [3, 12]. The error associated with evaluating the experiment using Modern Mechanics is one–twelfth of the error magnitude associated with the original experiment and one-third of the error magnitude associated with relativity theory. Thus, Modern Mechanics 1) exceeds the performance of relativity theory when the error is retained and 2) matches the performance of relativity theory when the error in both cases is dismissed. Notice that the Michelson-Morley experiment can be used to differentiate Modern Mechanics from relativity since relativity requires a revised expected result of 0km/s, while Modern Mechanics retains the original expected result of 30km/s.
Conceptual Differences Between Relativity and Modern Mechanics
With Modern Mechanics theoretically developed and initial experimental support established, we now examine the concepts, assumptions, and implications that differentiate Modern Mechanics from relativity. As discussed above, the most significant difference is that Modern Mechanics explicitly recognizes three types of systems: stationary, moving, and oscillating. In contrast, while relativity uses three systems in its mathematical derivation, it explicitly recognizes only two types of systems: stationary and moving. An important implication of this difference is that Modern Mechanics retains the translation equations to determine the position of moving systems, and associatesξ , η , and ζ with oscillating systems. This differs from relativity theory, which uses adjustedξ , η , and ζ equations as replacements for the translation equations associated with moving systems.
The treatment of a three–system model as a two–system model, as performed by relativity theory, requires the introduction of length contraction and time dilation. Specifically, length contraction explains the association of $\xi$ and $x'$ to both represent the length of the moving system. Time dilation is used to explain the mathematical use of the $\sqrt{1 - \frac{v^2}{c^2}}$ adjustment required for the equations to serve as translation equation replacements. While these concepts are required by relativity, Modern Mechanics requires neither.
A second difference is associated with the position of the oscillating system in relationship to the moving system when both are in motion. As discussed earlier, the forward length $T$ represents the length required for the oscillating system to travel the length of the moving system. When the velocity of the moving system is greater than zero, $\xi < T$, thus we conclude that when the oscillating system has travelled length $\xi$ it has not reached the other end of the moving system. This differs from relativity theory, where through the definition of the principle of relativity and the concept of simultaneity, when the oscillating system has traveled length $\xi$ it is presumed to have traversed the length of the moving system.
A third difference is associated with an implication of the principle of relativity, where the velocity of the moving system is constrained such that it must be less than that of the oscillating system. In contrast, Modern Mechanics does not constrain the moving system’s velocity. Instead, when the velocity of the moving system exceeds that of an oscillating system, the equations do not apply. This is consistent with the answer to the second question asked at the beginning of this paper, which concluded that a moving system’s velocity can exceed that of an oscillating system. Concretely, when the velocity of a bus exceeds that of a jogger, $\xi$ cannot be properly determined since $T$ cannot be found; however, this does not limit the bus’s velocity.
A fourth difference is associated with the meaning of the variable $c$. Consistent with the principle of the constancy of the velocity of light, relativity theory uses $c$ to represent the constant speed of light traveling through a vacuum. In contrast, Modern Mechanics generalizes $c$ to represent the constant velocity of an oscillating system or as the propagation velocity of the wave medium associated with the oscillating system.
This discussion raises several questions regarding Einstein’s original derivation. One question results from Einstein stating that the time required for a ray of light to travel the forward length is $\frac{x'}{c - v}$ and the time for the ray of light to travel the reflected length is $\frac{x'}{c + v}$. Thus, the total cyclical distance traveled by the ray of light is $L = \frac{2x'}{1 - \frac{v^2}{c^2}}$.
Since we have shown that $\xi = \frac{1}{2} L$ represents one half the length traveled by the oscillating system (i.e., ray of light), how does the principle of relativity enable this length to be repurposed to represent the position of a moving system? A second issue is associated with mathematical consistency. Modern Mechanics and relativity both state $\xi = \tau c$ as part of their derivations. However, Einstein combines his intermediate $\tau$ equation with $x' = x - vt$ while simplifying $\tau$ into its final form, confounding the overloaded variable $t$. Specifically, prior to replacing $x'$ with its value and simplifying, Einstein does not complete Step B, discussed earlier, in finding $\tau$ by replacing $t$ with the forward time. Thus, when Einstein’s final equations are evaluated using the concrete example: $x = 1$, $v = 0$, and $t = 0$, we find $\xi = 1$ and $\tau = 0$. This inequality, where $\xi \neq \tau c$, exists for nearly all combinations of $x, v$, and $t$.
Conclusion
Conceptually, Modern Mechanics is a classical mechanics–based, three system model of motion consisting of stationary, moving, and oscillating systems that work in concert with the Newtonian translation equations. This differs from the relativity two–system theory that replaces the Newtonian translation equations. Specifically, Modern Mechanics defines $\xi$ to represent one-half of the total length an oscillating system travels in one cycle. Expressed as $\xi = \frac{1}{2} L$, it is also written as $\xi = \frac{x'}{1 - \frac{v^2}{c^2}}$ when expressed in terms of the length of the moving system, $x'$, the velocity of the moving system, $v$, and the velocity of the oscillating system, $c$. Modern Mechanics, which does not associate oscillating system lengths with moving system positions, does not require length contraction, time dilation, or limit the velocity of moving systems.
This paper also showed that Einstein’s seminal 1905 special relativity theory derivation contains a mathematical inconsistency where the equality of the statement $\xi = \tau c$ that is used to produce the $\xi$ equation is not maintained in the final transformation equations. Additionally, this paper has shown that experimental support for special relativity theory is based on the dismissal of the original hypothesis and experimental findings of the Michelson-Morley experiment. Specifically, their hypothesis of an expected Earth orbital velocity of 30km/s is rejected and replaced with 0km/s, and their observed computed velocity of 5 to 8km/s is rejected as experimental error, where it is ignored and replaced with 0km/s. Generally, an experiment whose hypothesis and experimental findings are both rejected cannot be used as foundational support for any theory.
In contrast, when the Michelson-Morley experiment is analyzed using the Modern Mechanics equations, the experiment is confirmed as detecting and Earth orbital velocity of 30km/s, thus aligning with their original hypothesis and measured observations. Additional experimental support for Modern Mechanics is found through existing experiments that confirm E = mc2.
Modern Mechanics is a classical mechanics-based, non- relativistic, theory of motion that explains experiments and observations previously associated with relativity theory alone. Specifically, Modern Mechanics is shown to produce E = mc2 and explains the Michelson–Morley experiment with less error than is associated with their original analysis or is associated with a relativistic evaluation of their experiment. While relativity theory has been the only theory that reconciled kinematics with electromagnetics, these experimental findings suggest that this reconciliation is also attained using Modern Mechanics.
References
-
Einstein A (1905b) Zur Elektrodynamik bewegter Körper [On the Electrodynamics of Moving Bodies]. Annalen der Physik 322(10): 891-921.
-
Einstein A (1905a) Ist die Trägheit eines Körpers von seinem Energieinhalt abhängig? [Does the Intertia of a Body Depend Upon its Energy-Content?]. Annalen der Physik 323(13): 639-641.
-
Bryant S (2016) Disruptive: Rewriting the rules of physics. Infinite Circle Publishing, pp: 328.
-
Dingle H (1967) The Case Against Special Relativity. Nature 216(5111): 119-122.
-
McCrea WH (1967) Why the Special Theory of Relativity is Correct. Nature 216(5111):122-124.
-
Miller DC (1933) The Ether-Drift Experiment and the Determination of the Absolute Motion of the Earth. Reviews of Modern Physics 5(3): 203-242.
-
Shankland RS, McCuskey SW, Leone FC, Kuerti G (1955) New Analysis of the Interferometer Observations of Dayton C. Miller. Reviews of Modern Physics 27(2): 167- 178.
-
Bryant S (2010) The Failure of the Einstein-Lorentz Spherical Wave Proof. Conference Proceedings, NPA Conference, California State University, Long Beach, California, pp: 1-4.
-
Einstein A (1961) Relativity: The Special and the General Theory. United States: Three Rivers Press.
-
Mermin ND (2006) It’s About Time.
-
Michelson A, Morley E (1887) On the Relative Motion of the Earth and the Luminiferous Ether. American Journal of Science s3-34(203): 333-345.
-
Bryant S (2008) Revisiting the Michelson and Morley experiment to reveal and Earth orbital velocity of 30 kilometers per second. Galilean Electrodynamics 19(3).
- Sense, Gravity, Parity & Chirality in Mathematical Physics
- Quantum Lattice Simulations PHYSICS: Microcircuit Particle Formation and Observable Macroscopic Irreversible Time - A Discrete Lagrangian with Cellular Automata Framework
- Quantum Biology from Biomacromolecule to Cell, and Central Dogma Described by Quantum Theory
- Focus, Agility, Speed and Technology (FAST) for Sustainability and Growth
- Square Root Metric Geometry and Pati-Salam Model in Curved Space-Time
- A Simple System Demonstrating the Mpemba Effect in Classical Mechanics