A Gradient-Based Economic Model Predictive Controller with Zone Control Scheme Applied to Natural Gas Pipeline Networks
This paper addresses a one-layer model predictive control (MPC) strategy that simultaneously deals with safety and economic issues for natural gas networks (NGN). The simulations consider a nonlinear pipeline model based on the non-isothermal flow and non-deal gas behavior. The proposed NGN-oriented MPC strategy uses an adaptive scheme that relies upon the successive linearization of the nonlinear NGN model and the surge prevention constraints of the compression stations, incorporated into the control law to avoid unsafe operating conditions. The controller has the guarantee of feasibility by incorporating a suitable set of slack variables into its formulation, mainly in the surge avoidance constraints. At the same time, the resulting control law is more flexible by adopting output zone tracking cases rather than setpoint tracking. The simulated study, aiming at minimizing the power consumption of the centrifugal compressors, sought to control the pressures in the consumer nodes of NGN into a predefined zone while meeting the process constraints. In all scenarios of zone changes, the controller could lead the controlled outputs in their respective zones, accommodating the operation in steady states with a minimal power consumption of three compression stations considered in NGN. By respecting the surge prevention constraints flexibly, and using the slack variables when necessary, immediately after perturbation, the proposed NGN-oriented adaptive zone MPC controller has proved to be a suitable tool to manage the NGN with control performance, operational safe and economic competitivity.
Introduction
In the last decade, natural gas has become an essential resource in the world energy matrix because of its lower price, more accessible transport scheme, and lower environmental impact than other fossil fuels [1]. Within these advantages, the transport of this fuel by pipeline stands out. Since the natural gas pipeline network (NGN) guarantees this fuel’s continuous access, they decrease the dependency on natural gas from logistic problems [2]. However, NGN has a high cost to maintain the flow of gas in long-distance pipes, mainly due to the compression systems, which can consume about 3 % to 5 % of natural gas transported through centrifugal compressors [3].
In addition to the high operational cost involved, another challenge related to NGNs is ensuring natural gas demand in a volatile market condition with the higher efficiency possible. Inside the natural gas market rules, the operation of natural gas is susceptible to its price, energy demand, and industrial requirements. On the other hand, transporting the gas over long distances consumes part of natural gas to recompress itself gas. Thus, according to the natural gas demand, the best condition to operate the NGN can continuously change [4].
Another issue associated with the NGN process is the safety of compression systems. Compressors are essential equipment in NGN, so that centrifugal compressors are, particularly, the most abundant in such a process. However, centrifugal compressors have operational constraints that, when violated, can lead the process to fail. The two most important constraints are the surge operating condition and the stonewall one. The surge constraint is undoubtedly the most relevant safety issue in centrifugal compressors, and in NGN operational schemes, it is always a critical constraint to be considered and addressed [4, 5, 6]. The motivations for this are: in the surge phenomenon, a low gas flow changes its direction, returning to the compressor suction, causing the oscillation of flow, and leading the process to an unstable condition; the other one is the fact that the surge constraint matches with the most isentropic efficiency of the compressor, what means to operate the process near the surge condition can be economically beneficial, reducing the amount of energy to compress the gas [7].
Therefore, in this environment where it is necessary to reduce the process cost while maintaining the process in safe conditions and attending the market oscillations, the advanced control schemes have been highlighted as a proper way to manage the process. The Model Predictive Control strategy (MPC) has been presented as a suitable and systematic mechanism to operate the NGN optimally. Such an approach is based on forecasting plant behavior through a dynamic model, so evaluate the best movements to lead the system to the operational target. The MPC schemes for NGN are in progress, initiated at the beginning of the century with the work by Zhu, et al. [8]. However, as far as we know, NGN-oriented MPC schemes use dynamics models with quite restrictive assumptions, such as a simple gas behavior [4] and isothermal flow [1, 9]. Such premises result in simplified concentrated parameters-based models to describe the pipelines, and it can lead to a considerable mismatch between the plant and the model used in MPC. The last works with MPC focused on NGN have considered two modeling approaches: the phenomenological approach [9] and data-driven approaches such as an artificial neural network – ANN [1]. In summary, these approaches are based on either first-principle models, which ignore the thermal conditions (by considering an inappropriate isothermal behavior in compression system) or, when using an ANN-type data-driven scheme, a new training step with a particular frequency is required. To circumvent this, this paper proposes using a phenomenological approach that accommodates the energy balance and equation of state- based non-ideal gas behavior for providing an NGN model based on algebraic-partial differential equations (PDAE).
In this work, the rigorous phenomenological model for NGN will be incorporated into the nonlinear model of the plant, and this model and surge prevention constraint will feed a successive linearization-based adaptive MPC scheme, coupled with an infinite horizon predictive control strategy (IHMPC) [10]. The proposed NGN-oriented MPC controller consists of a one-layer economic scheme based on the gradient of economic function [11]. The resulting control law explicitly considers the surge avoidance issue via slacked constraints, guaranteeing the feasibility of the controller by using adequately slack variables [12, 13]. Also, it considers zone tracking scenarios [14] rather than set-point tracking in the proposed control method to provide additional degrees of freedom while accommodating the practical industrial case in a condition with a lower economic cost, and it avoids numerical issues to find the controller solution.
Natural Gas Network Modeling
Pipelines Modeling
The modeling of the natural gas network has been performed by considering the non-isothermal flow through mass, energy, and momentum balance equations, turning out to be the following partial differential equations [15]:
( ) 0, w $$ \frac {\partial \rho}{\partial t} + \frac {\partial (\rho w)}{\partial x} = 0, \tag {1} $$ t x ( ) ( ) 2 , 2 P w w w $$ \frac {\partial \left(\rho w\right)}{\partial t} + \frac {\partial \left(P + \rho w ^ {2}\right)}{\partial x} = - f \frac {\rho w | w |}{2 D}, \tag {2} $$ D f w t x $$ \frac {\partial}{\partial t} \left[ \left(u + \frac {w ^ {2}}{2}\right) \rho \right] + \frac {\partial}{\partial x} \left[ \left(u + \frac {P}{\rho} + \frac {w ^ {2}}{2}\right) \rho w \right] = $$
2 2 , 2 2 u u w P q x w w t ρ ρ ρ ρ (3)
where ρ is the specific mass, w is the velocity, P is the pressure, T is the temperature, u is the internal energy, h is the enthalpy, q is the heat changed with the soil, and f is the friction factor. Finally, the independent variables are the time, t, and spatial position, x. The calculation of f has been evaluated by Zigrang and Sylvester [16] equation, given by:
= − − − +
1 5.02 5.02 13 4log log log , 3.7 3.7 3.7 4
∫ ∫ ∫ D Re D Re D Re f
(4)
where ò is the pipe roughness, D is the pipe diameter, and Re is the Reynold number ( / ) Re w D ρ µ = , where µ is the gas viscosity. While the heat exchanged in the pipe is given by:
( ) 1 4 , ρ = − soil U q T T D (5)
where soil T is the temperature of soil and U is the global heat transfer coefficient, expressed by:
1 , 2 1 cosh 2 th κ (6)
U z D D
− = +
1 soil soil where soil z is the height from the pipe to the soil surface, soil κ is the thermal conductivity coefficient of soil, and th is the convective heat transfer coefficient, given by:
( ) ( ) ( )
2 κ −
1 2/3 181.82log10 1.64 1000 , 1.07 12.7 1.82log10 1.64 1
− − − = + − − t Re Re Pr h D Re Pr ( ) ( ) ( ) (7) where κ is the gas thermal conductivity, Pr is the Prandtl number. More details on the properties of the pipeline and the soil can be viewed in Table 1.
The equation of state of Benedict-Webb-Rubin (BWR) has been used here to evaluate the thermodynamical conditions of gas, given that such an equation has a good fitness with the natural gas data, in addition to its parameters are appropriately assessed for hydrocarbons mixtures [17].
C C P RT B RT A bRT a a e T T
2 3 2 3 6 0 0 0 2 2 1 , γρ ρ ρ ρ ρ ρ α ρ γ − = + − − + − + + +
( ) ( ) ( )
(8) where 0 0 0 , , , , , , , A B C a b C α γ are the BWR parameters for the gas mixture, R is the ideal gas constant.
The boundary conditions of pipelines PDE can be split into two cases. The first one is for the pipelines which end in a compression system, ( ) ( ) ( )
0 , T x T
= =
= = L Where T0 and P0 are the temperature and pressure at the beginning of pipes, and PL is the pressure at the end of the pipes. At the end of the NGN pipes, in the consumer nodes, it is assumed that the consumers will require a flow rate from NGN, thus the boundary conditions are described by, ( ) 0 0 , = = T x T ( ) 0 0 , = = P x P (10) ( ) , = = L Q x L Q where L Qis the flow rate at the end of pipes, conforming is assumed in most works of NGN simulations [1, 18].
| Variable | Value | Unit |
|---|---|---|
| | 1.5 x 10 -6 | m |
| K soil | 0.89 | W/(m-K) |
| T soil | 15 | °C |
| Z soil | 2 | m |
Table 1: Data of natural gas pipelines and soil.
Compression System Modeling
The modeled compression system is composed of a centrifugal compressor, a heat exchanger, and a recycle valve, as shown in Figure 1. Typically there is an additional recycle valve to protect the centrifugal compressor from the surge phenomenon; however, the anti-surge control must have a fast response and manufacturers include such control schemes. Thus, in this work, the recycle valve in Figure 1 is an additional resource (extra degrees of freedom) to avoid the surge region within a management control layer, and it must have another recycle corresponding to a surge control with surge prevention, study object of this work, in a more internal control layer.
The compression system has been modeled by using a pseudo-stationary condition, thus, it assumes that the flow dynamics of the pipelines is much smaller than one in the compression system. In Figure 1, six sets of states are relevant to modeling, namely: the feed of the compression system from pipe i, represented by ,i n X ; the compressor suction - ,1 c X ; the compressor and hear exchanger discharge - ,2 c X ; the feed and output of the recycle valve, ,1 r X and ,2 r X ; and finally the feed of the next pipe j - 0, j X , where X is the set of the three states (temperature, mass flow rate, end pressure) evaluated by a set of three algebraic equations, as will be presented hereafter. Here X is the vector given by:
[ ] . X = T P m T (11)
The first set of algebraic equations is related to the compressor suction, which is built by mass and energy balance equations, and the equality between the mass flow rate of the suction and the discharge for compressor.
, ,2 ,1 0, + − = n i r c m m m (12)
( ) ( ) ( ) , , , ,2 ,2 ,2 ,1 ,1 ,1 , , , 0, n i n i n i r r r c c c m h T P m h T P m h T P + − = (13) ,1 ,2 0. c c m m − = (14) where index m , index P , and index T are mass flow rate, gas pressure, and the gas temperature respectively, where the has been described in Figure 1.
In order to model the compressor discharge, it will be necessary to know the compressor map to obtain the compression ratio and the axial compressor work, and this way, evaluate the states ,2, c X by the compression ratio, the energy balance between the suction and discharge in the compressor, and the mass balance after the compression, ( ) ,2 ,1 ,1 , 0, c c c P N m P φ − = (15) ( ) ( ) ,2 ,2 ,1 ,1 , , 0, c c c c c axial hc h T P h T P N w q − − − = (16) ,2 ,1 0, 0. c r j m m m − − = (17) where φ is pressure ratio in the compressor map as function of the compressor speed N, and the compressor mass flow rate ,1 c m , ( ) , h T P is the enthalpy of the gas as function of temperature and pressure according with the equation of the state for a nonideal gas, and axial w is the compressor power, and hc q the the heat rate in the heat exchanger in the Figure 1.
This work uses the approach proposed in Meira, et al. [19] to model the compressor map, which expands the NASA shockwave loss theory to non-ideal gas cases.
Finally, concerning the model states related to the recycling valve, it will be assumed the thermal conditions of the valve upstream are the same as the compressor system discharge. Moreover, it will be assumed that the mass flow rate is the same in the valve upstream and downstream. In symbols:
,1 ,2 0, r c T T − = (18)
,1 ,2 0, r c P P − = (19)
,1 ,2 0. r r m m − = (20)
For the valve downstream, one assumes that its pressure is the same in the compressor suction. Also, the assumption of the isenthalpic condition is adequately considered. Finally, the mass flow rate is under a mode-cascade-based control scheme much faster than the flow dynamics in the pipeline, which allows us to assume that such a state can be an input of the process. In symbols:
,2 ,1 0, − = r c P P (21)
( ) ( ) ,2 ,2 ,1 ,1 , , 0, − = c c r r h T P h T P (22) ( ) ,2 0. − = r v m m t (23) Therefore, based on this modeling, it is possible to define the compression system that will play the role of boundary conditions to the pipeline PDE.
Numerical Solution Approach
To solve resulting PDE, it will be carried out a spatial discretization by using the finite-difference method with five points [15], where the spatial differentiation will be evaluated by:
y a y x (24) ∂ = ∂ ∑i i i
5
1 , = where y represents the dependent variables in PDE, and ia is the weight of the finite-difference method obtained by differentiation of the Lagrange polynomials. This approach will convert the PDE into a set of differential- algebraic equations (DAE) whose differential equations will be provided by spatial discretization whereas boundary conditions, as well as the pseudo-stationary state of the compression system, will provide the algebraic equation. Finally, to evaluate the DAE numerically, it will be used the automatic differentiation of CasADi framework [19].
The Proposed Gradient-Based Economic MPC for Natural Gas Networks
The proposed model predictive controller inherits properties from Alvarez, et al. [11], whose proposal is to couple the control actions and the economic target in the same optimization layer, namely economic MPC based on the gradient of an economic function. In order to accommodate the practice case, a zone control scheme [14] will be incorporated into the proposed control law. Therefore, the resulting control law of this proposal aims to solve the following optimization problem:
1 2 2 2 | , , , , 1 0 min , u m ∞
− + + + ∆ = = = − + ∆ + − ∑ ∑ Q R P u y y y k k i k sp k k m e k e k i i V f t ∞ , k sp k (25)
subject to the proposed natural gas network model, linearized at each sampling instant k, and , , ≤ ≤ min max y y y sp k (26) | , 1,2, , , + ≤ ≤ = … min max u u u k j k j m (27) | , 1,2, , 1, + ∆ ≤∆ ≤∆ = … − min max u u u k j k j m (28) | , 0, 1,2, , , + − + ≤ = … surge k surge Q Q ck j k c a j m (29) Where y is the process variable (in this work, they will be the pressure of gas in consumer nodes), u is the manipulated variables (in this work, they will be the compressor speed and the mass flow rate in recycle valve), fe is the economic function, te is the economic target (profit set-point). For the decision variables, the trend of control actions are T T T T m ∆ = ∆ ∆ ∆ Λ u u u u , and the sp y is the process variable setpoint. Q and R are the weighting matrices for the process variables, control actions, and P economic functions, respectively. c Q is the flow rate in compressors, and ,surge c Q is the flow rate in the surge line, and surge a is the safety factor of the surge prevention line, assumed as 1.1 based on Ghazanfarihashemi, et al. [20]. The surge line has been evaluated by the approach presented by Meira, et al. [21] by using the phenomenological approach [7] given by,
1 2 ( ) , , 0, η ∂ = ∂ surge c c Q N Q (30) where η is the isentropic efficiency of the compressor. Thus, the solution of the expression (29) given a compressor speed (N) will result in the ,surge c Q - the flow rate in the surge condition, which will be used as a constraint of the control scheme, as the surge prevention constraint, , 1.1 0, − ≤ surge c c Q Q (31) where c Q is the volumetric flow rate of the gas in compressor. In some works, such constraint also can be rewritten as a relative surge line distance (SLD) [22], , 100 10 . − = × < − Q Q % % Q surge , surge SLD c c (32) c On the other hand, the economic function fe has been evaluated by the sum of power consumed in centrifugal compressors (Pot), given by,
, , , 1 , , = = = ∑ e c i axial i i c i i f Pot m w N Q (33)
( ) 3 where c m is the mass flow rate in the compressor. As this function and the NGN model are nonlinear, evaluating at each time step k by the controller can demand much time. Because of that, so this work opts by linearizing the NGN space-discretized model, along with the economic function and the surge line.
For the NGN modeling, after linearization, it was built a state-space model as proposed in Odloak, et al. [10], by similarity transformation, which allows the evaluation of states in the infinite horizon-based MPC scheme proposed here, namely:
I x x B u F x x B
0 = + ∆ B
s s s k k k st st st st k k (34)
k x y I Ø x [ ] = C
s k k st k (35)
k where st x is of the vector of the stable states, sx is the vector of the integrating states introduced by incremental form of inputs, responsible for the offset eliminating in the control law. The auxiliaries matrices st F , s B , and can be evaluated by steps presented in Odloak, et al. [10].
For the economic function, it must be evaluated in k + ∞step, besides that, due to the expression (33) being a nonlinear equation, it must be successively linearizated to apply in the cost function of IHMPC, evaluated as:
( ) ( ) , , , 1| , | , ∞ ∞ + + − + = + ∇ + ∇ T T
u y u y e k e k e k k m k e k k k f f f f (36) where , 1 e k f − is the economic function in step 1 k −, and e e f f ∇ ∇ y u is the gradient of the economic function for the process and manipulated variables, respectively.
Thus, the cost function of the proposed MPC can be obtained by adapting the approach of Odloak, et al. [11], and it can be rewritten as:
1 2 2 | , 1 0
m ∞ − ∑ ∑ R Q
y y u V
= − + ∆ k k i k sp k k m i i + + = =
(37) ( ) ( ) T T
2 u y f f f t + + − ∇ + ∇
u y P
, , 1| , | ,
e k e k k m k e k k k e k ∞
+ − + The infinite sum in (37) can then be evaluated as follows:
m s st k i k sp k k i k sp k k i k sp k k i k i i i ∞ ∞
2 2 2 + + + + = = = + − = − + − + Ψ ∑ ∑ ∑ Q Q Q m y y y y x y x | , | , | , | 1 1 1 .
(38) In order to bound the infinite sum associated with the artificial integrating states, a terminal equality constraint must be imposed to the control optimization problem:
| , 0. + − = x y s k m k sp k (39)
On the other hand, as st x are stables, they yield a convergent term, in such a way that:
∞
+ + = = ∑ Q Q x x st st k i k k m i
2 2 | 1 , (40)
where Q is the terminal weighting matrix obtained from the solution of the Lyapunov equation:
( ) ( ) Q Q Φ − Φ = T T F F F Q F st st st st st st (41) Since an equality constraint can compromise the feasibility of the controller, it is common to use slack variables to soften it. Such a strategy may also be used to soften the surge prevention constraint, as Meira, et al. [22] proposed. Thus, the final form of the proposed MPC controller results in
1 2 2 2 | , , , , , 1 0
m m s st k k i k sp k y k k m k m i i −
∑ ∑ surge R Q u y Q
x y x u min δ δ V
δ = − − + + ∆ +
+ + + ∆ = =
, , , k sp k y k k ( ) ( )
T T
u y
2 , 1 , 1| , | ,
f f f t ∇ + + + ∇ − +
u y P
e k e k k m k e k k k e k − + − +
∞
2 2 , , δ δ + + y surge S surge S y k k
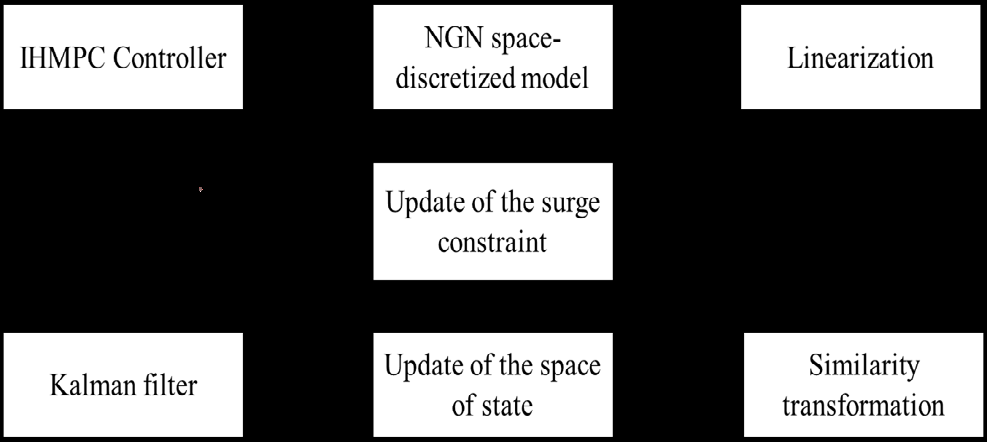
(42) subject to the natural gas network model linearized at each sampling instant k, (26) to (28), and, | , , 0 δ + − − = x y s k m k sp k y k (43) | , , 1.1 0, 1, 2, , surge surge j c j c j m κ κ κ κ κ δ + + + ≤ = … -Q Q - (44) where y δ and , surge k δ are the slack variables for the terminal constraint and the surge prevention constraint, respectively, weighted by matrices y S and surge S . Figure 2 summarizes the adaptive scheme based on Meira, et al. [23]. It is relevant to point out that the slack in the surge prevention constraint must be weighted enough to guarantee the reduction of , surge k δ to near zero when the controller leads the process to stationary condition.
Results And Discussion
The case simulation study is represented in Figure 2. The economic function considered here is to minimize the power consumption of the compression system. At the same time, the pressures in consumer nodes are the controlled variables, which will be accommodated by the zone tracking scheme instead of set-point tracking one, while the rotational frequency of compressors and mass flow rate of the recycle valve, in compression nodes 1, 2 and 3, will be the manipulated variables of the controller. Also, the economic target te in (42) will be set at zero, given that the aim is the lowest energy consumption, even if such value is unreachable. Furthermore, all compression system operations must meet the surge prevention line to maintain the process’s safety. The nonlinear plant model will be considered the PDE discretization by using the numerical solution of the CasADi framework according with Figure 2.
In the simulation reference of the zones related to the pressures in consumer nodes ( ,1 ,2 and f f P P ) are limited to the maximum value of 5.0 MPa, while the minimum value will change throughout the simulation case, the operational conditions are presented in Table 2. Also, according to the expression (32), SLD will be set up as lower than -10% to maintain the system in safe operating conditions. The tuning parameters of the controller, obtained from a sensitivity analysis, are summarized in Table 3, the sampling time for the controller actions considered here is 300s.
| Variable | Value | Unit |
|---|---|---|
| Source nodes suction data | ||
| T 0 | 288.2 | K |
| P 0 | 7800 | kPa |
| Compression systems heat changer data | ||
| q hc,1 | 2299 | kW |
| q hc,1 | 2018 | kW |
| q hc,1 | 1035 | kW |
| Consumer nodes volume flow rate | ||
| Q L,1 | 0.629 | M3/s |
| Q L,2 | 0.523 | M3/s |
| Tuning parameters | Value | |
| m | 3 | |
| Q | diag[30 30] | |
| R | diag[250 250 250 800 8000] | |
| P | diag[1000] | |
| S y | diag[105 105 105] | |
| S surge | diag[106 106 106] | |
| t e | 0 | |
Table 2: Natural gas network operational condition variables.
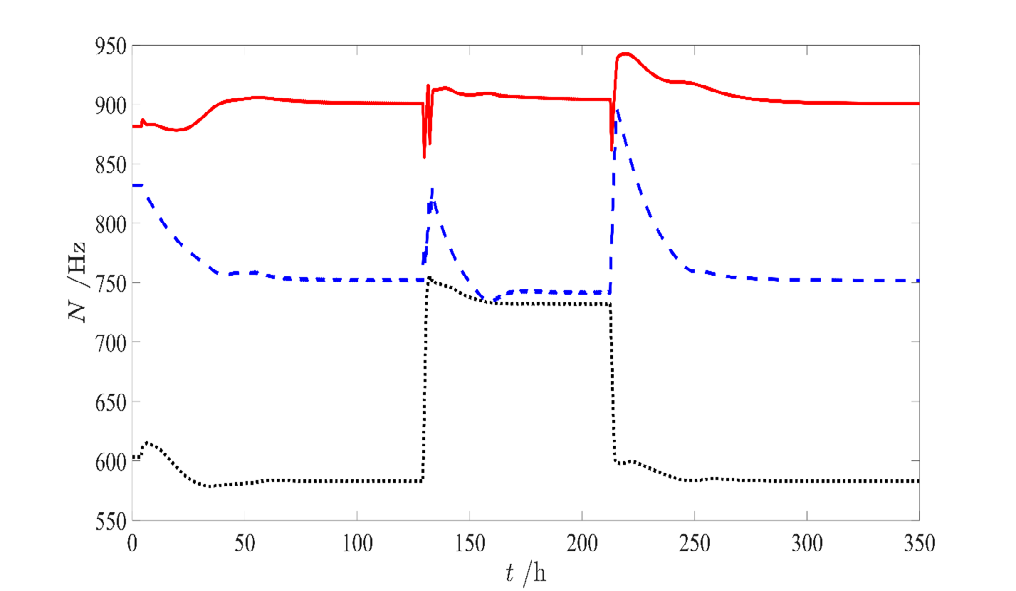
The simulation results are detailed in Figure 4 to Figure 7. These show that the proposed controller succeeded in leading the ,1 ,2 and f f P P to their predefined zones in all scenarios of zone changes. Concerning the manipulated variables, the rotational frequencies of the compressors were successfully modulated to accommodate the minimal power consumption of these pieces of equipment. At the same time, it is possible to notice that the mass flow rates in recycle valves in Compression Systems 2 and 3 were only used to meet the surge prevention constraint, given that, contrarily, their values are returned to zero to avoid increasing the energy consumption in compression systems. However, for Compression System 1, the mass flow rates in the recycle valve have been used in almost all simulations, once the compression process is near the surge prevention line, as demonstrated in Figure 6. Another prominent controller feature is its capacity to deal with surge prevention via slacked SLD constraints, thus ensuring the feasibility of the MPC controller. As shown in Figure 6, the controller could meet the target at lower -10% SLD and used only the slacks in a few time steps in compression system 1, immediately after perturbations. Due to the large weighting values on surge S , slacks are used only when necessary, and as a consequence, the controller can bring back the system rapidly at the maximum target of -10% SLD when this constraint is violated. This process behavior can indicate a good performance of the controller to seek the minimal economic cost condition, once the poins near the surge line (SLD = 0) have high isentropic efficiency [7].
![Figure 2: Adaptive scheme based on Meira, et al. [23].](/fulltextimages/10157/fig_2.png)
Legend: (
) pressure, ( $$ - \bigcirc $$
$$ \mathbf {3} $$
)limits of pressure zones. Figure 4: Pressure in the consumer nodes.
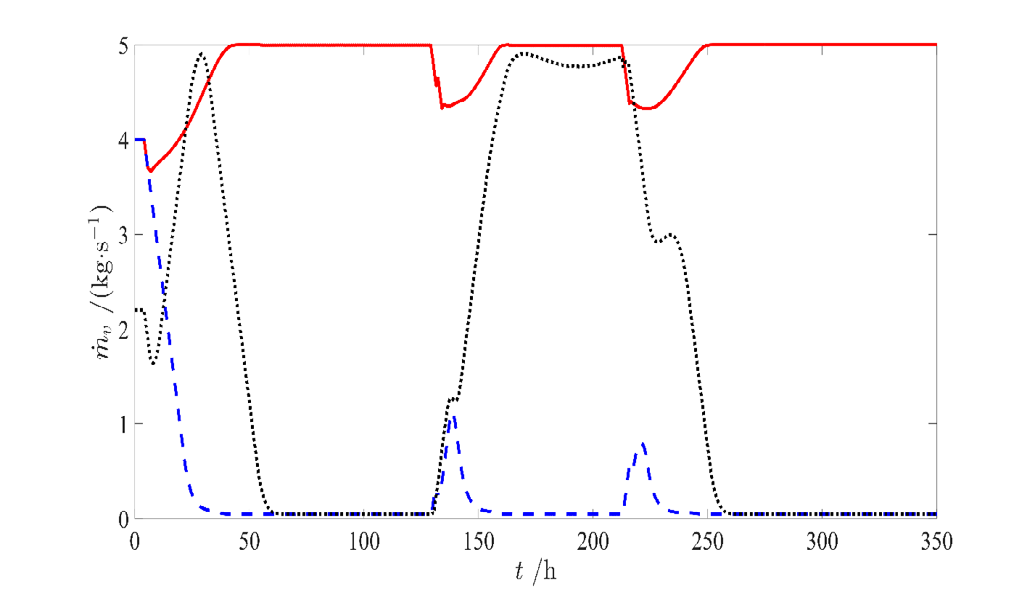
) the compression system 3. Figure 5: Response of manipulated variables for each compression system.
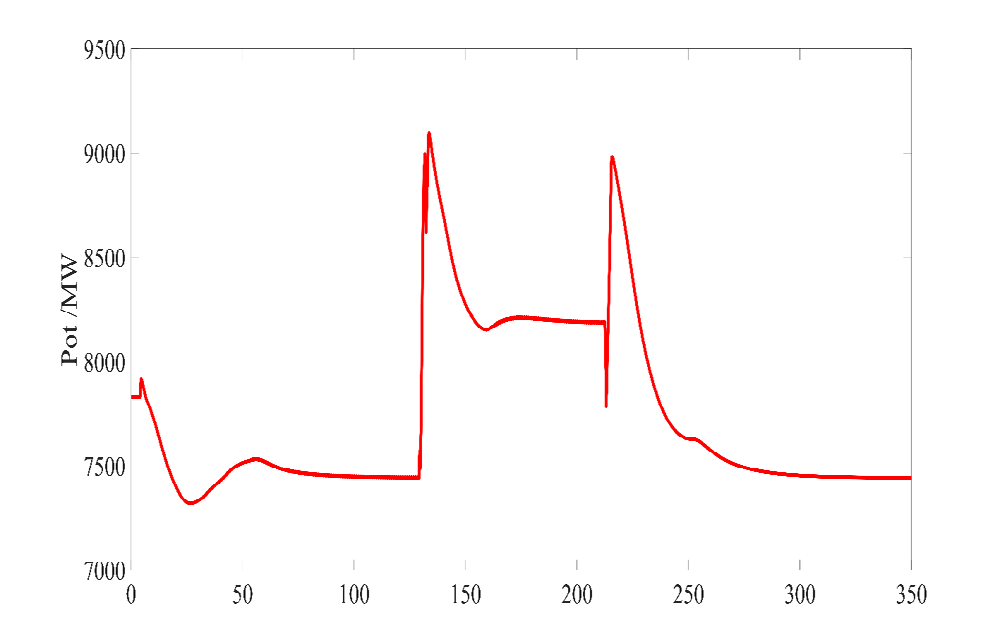
Finally, regarding the behavior of the energy consumption of compression systems throughout the zone tracking scenarios, it is noticeable that the controller can accommodate the compression system at steady states with minimal power consumption possible, after zone changes (Figure 7), implying the minimal cost associated with the operation of the compressors.
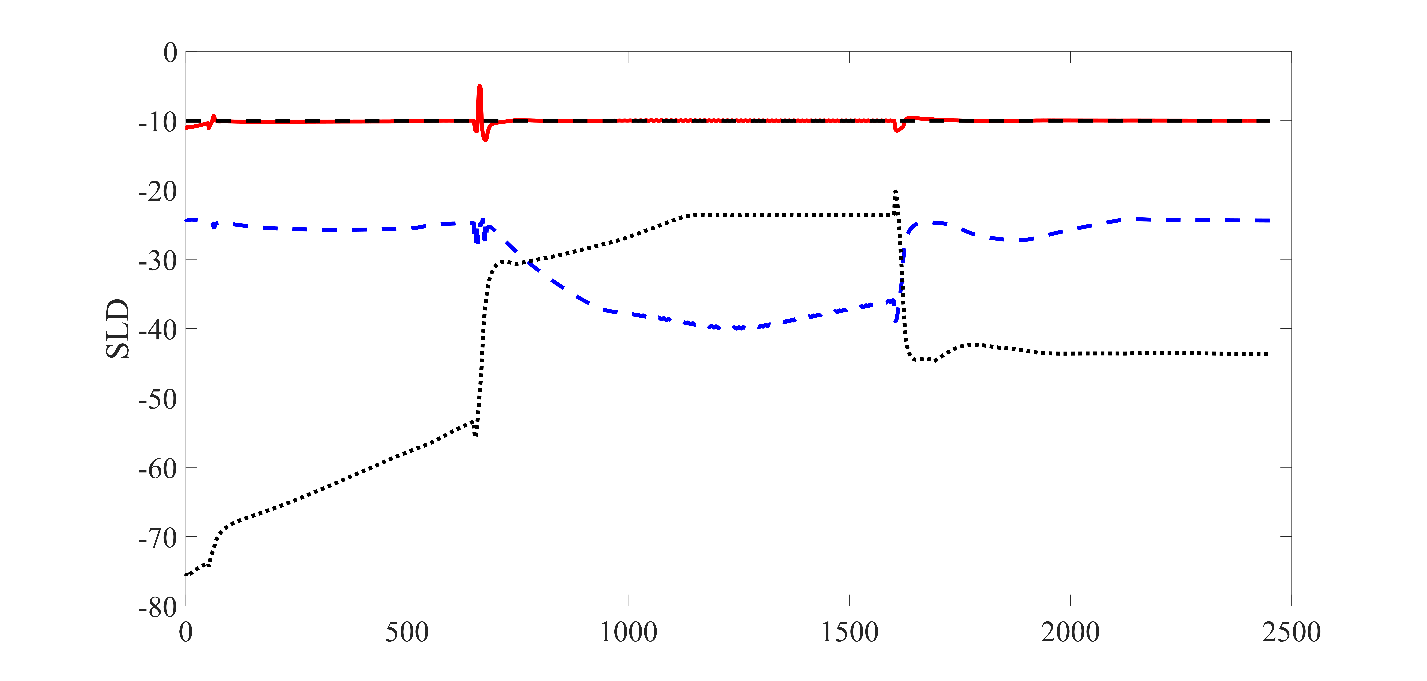
) the compression system 3. Figure 6: Response of surge line relative distances.
Conclusion
This work proposes a practical economic MPC scheme for natural gas networks (NGN), aiming to reduce the operational cost of compression systems. At the same time, the proposed controller incorporates softened surge prevention and zone control schemes in its control law. By considering a non-isothermal flow and non-ideal gas behavior to phenomenologically model NGN, the proposed adaptive strategy based on successive linearization of the nonlinear model and surge prevention constraint was responsible for providing fast computational responses to solve the resulting control law. The results showed that the controller could minimize the energy consumed in compression systems and successfully avoid unsafe operating conditions within the zone tracking simulated scenarios. These characteristics proved to be a one-layer strategy-oriented NGN management scheme that can ensure control performance, operational safe and economic competitivity. As directions of future perspectives of the work, one will seek to extend the proposed controller to distributed-cooperative MPC schemes in such a way as to treat more extensive and interconnected NGN.
Conflicts of Interest
(if applicable)
Acknowledgements
The authors would like to thank CNPq under grant 408339/2021-7.
Funding
FAPESB (Brazilian research agency of the State of Bahia) financially supported this work under grant BOL2333/2016.
References
-
Moetamedzadeh HR, Khanmirza E, Pourfard A, Madoliat R (2019) Intelligent nonlinear model predictive control of gas pipeline networks. Transactions of the Institute of Measurement and Control 41(16): 4569-4589.
-
Arya AK, Honwad S (2016) Modeling, simulation, and optimization of a high-pressure cross-country natural gas pipeline: Application of an ant colony optimization technique. J Pipeline Syst Eng Pract 7(1): 1-8.
-
Ríos-Mercado RZ, Borraz-Sánchez C (2015) Optimization problems in natural gas transportation systems: A state- of-the-art review. Appl Energy 147: 536-555.
-
Behrooz HA, Boozarjomehry RB (2017) Dynamic optimization of natural gas networks under customer demand uncertainties. Energy 134: 968-983.
-
Demissie A, Zhu W, Belachew CT (2017) A multi-objective optimization model for gas pipeline operations. Comput Chem Eng 100: 94-103.
-
Pourfard A, Moetamedzadeh H, Madoliat R, Khanmirza E (2019) Design of a neural network based predictive controller for natural gas pipelines in transient state. J Nat Gas Sci Eng 62: 275-293.
-
Ferguson TB (1963) The centrifugal compressor stage_._ Butterworths, London, pp: 152.
-
Zhu GY, Henson MA Megan L (2001) Dynamic modeling and linear model predictive control of gas pipeline networks. J Process Control 11(2): 129-148.
-
Pourfard A, Moetamedzadeh H, Madoliat R, Khanmirza E (2019) Design of a neural network based predictive controller for natural gas pipelines in transient state. J Nat Gas Sci Eng 62: 275-293.
-
Rodrigues MA, Odloak D (2003) An infinite horizon model predictive control for stable and integrating processes. Comput Chem Eng 27(8-9): 1113-1128.
-
Alvarez LA, Odloak D (2014) Reduction of the QP-MPC cascade structure to a single layer MPC. J Process Control 24(10): 1627-1638.
-
Silva BPM, Santana BA, Santos TLM, Martins MAF (2020) An implementable stabilizing model predictive controller applied to a rotary flexible link: An experimental case study. Control Eng Pract 99: 104396.
-
Martin PA, Zanin AC, Odloak D (2019) Integrating real- time optimization and model predictive control of a crude distillation unit. Brazilian Journal of Chemical Engineering 36(3): 1205-1222.
-
González AH, Odloak D (2009) A stable MPC with zone control. J Process Control 19(1): 110-122.
-
Chaczykowski M (2010) Transient flow in natural gas pipeline-The effect of pipeline thermal model. Appl Math Model 34(4): 1051-1067.
-
Zigrang DJ, Sylvester ND (1982) Explicit approximations to the solution of Colebrooks friction factor equation. AIChE Journal 28(3): 514-515.
-
Benedict M, Webb GB, Rubin LC (1940) An Empirical Equation for Thermodynamic Properties of Light Hydrocarbons and Their Mixtures I. Methane, Ethane, Propane and n-Butane. J Chem Phys 8(4): 334-345.
-
Chaczykowski M, Sund F, Zarodkiewicz P, Hope SM (2018) Gas composition tracking in transient pipeline flow. J Nat Gas Sci Eng 55: 321-330.
-
Andersson JAE, Gillis GJH, Rawlings JB, Diehl M (2019) CasADi-A software framework for nonlinear optimization and optimal control. Math Program Comput 11(1): 1-36.
-
Ghanbariannaeeni A, Ghazanfarihashemi G (2012) Protecting a centrifugal compressor from surge. Pipeline & Gas Journal 239(3): 60-64.
-
Meira RL, Costa GMN, Kalid AR, Martins MAF (2021) Improving the centrifugal compressor map through rigorous thermodynamic modeling: An analysis on a natural gas compression station pipeline. J Nat Gas Sci Eng 92: 104006.
-
Torrisi G, Grammatico S, Cortinovis A, Mercangoz M, Morari M, et al. (2017) Model Predictive Approaches for Active Surge Control in Centrifugal Compressors. IEEE Transactions on Control Systems Technology 25(6): 1947-1960.
-
Meira RL, Martins MAF, Kalid RA, Costa GMN (2022) Implementable MPC-based surge avoidance nonlinear control strategies for non-ideally modeled natural gas compression systems. J Nat Gas Sci Eng 102: 104573.
- Nigeria’s Vulnerability in the Face of Global Energy Policy
- A Simulation Study of Investigation of Optimum Oil Production Performance by Applying Various Gas Injection Methods in Oil Reservoir
- Characterization of Permo-Triassic Reservoirs through Thermal Maturity Assessment of Westphalian Source Rocks in the Cheshire Basin
- Influence of Microwax on the Rheological and Thermal Behaviour of a Wax Crude Oil
- Real-Time Monitoring and Performance Optimization of Steam Injection in Heavy Oil Reservoirs Using Fiber Optic Sensing and Integrated Predictive Simulation Models
- Rapid On-Site Determination of the Total Petroleum Hydrocarbon Content of Soils by Handheld Fourier Transform Near-Infrared Spectroscopy: Development of a Global, Site- and Scanner- Independent Calibration Model